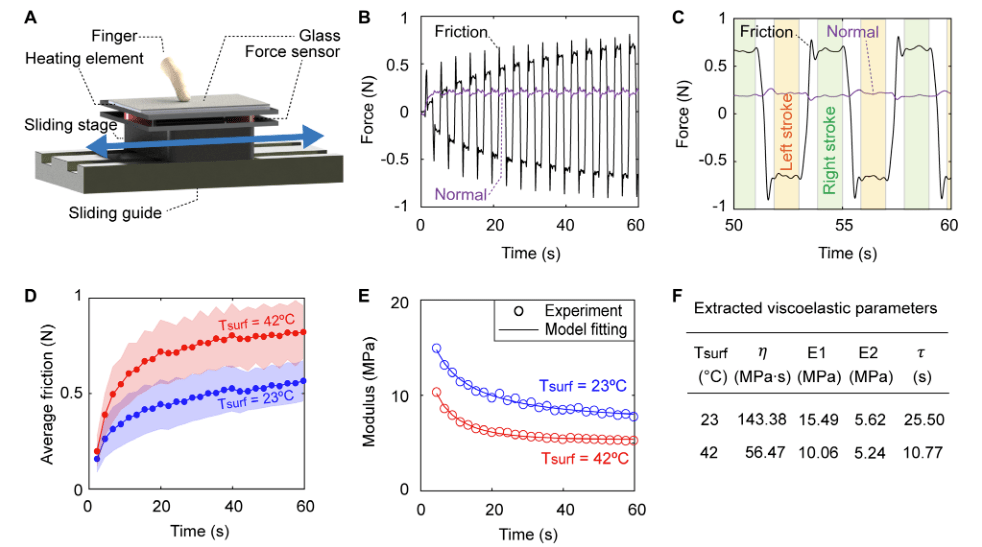
为探索该机理 , 研究团队先通过不同尺度的模拟和计算 , 建立了理论模型 , 再根据实验数据的拟合 , 排除了包括界面剪切强度等对摩擦力影响较小的因素 , 最终将摩擦力的变化归因于皮肤黏弹性模量随温度的变化以及手指含水量随温度的变化 。
文章图片
(来源:Science Robotics)
未来或将应用于元宇宙 , 以提升其虚拟触觉渲染效果

文章图片
据悉 , 现有的摩擦力调控表面触觉技术主要有两类 , 分别为超声振动表面产生的摩擦力减小 , 以及电粘滞效应产生的摩擦力增大 。
但这两种技术都存在一定的局限性 。 超声振动表面触觉技术需要振动整块或者大部分屏幕 , 因此耗电量较大 , 且不适于制作在大块屏幕上;电粘滞摩擦力调控技术需要在屏幕与手指之间建立强静电场 , 在一定程度上与触摸屏幕的触觉输入系统相互制约 。 这两种技术通常都需要 100V 以上的电压进行驱动 。
与这两种技术相比 , 基于表面温度的摩擦力调控手段显然在驱动电压、摩擦力调控效果等方面具有较为明显的优势 。
而且值得注意的是 , “新技术可以和前两者进行融合 , 进而拓宽表面触觉技术的能力范围 , 使更复杂的虚拟形貌渲染成为可能 。 ”马源表示 。

文章图片
图 | 德克萨斯 A&M 大学机械工程系 Candidate Chang Hyun Choi 博士(来源:马源)
目前 , 该团队正在申请针对该技术的相关专利 。
得益于信息时代和智能时代的蓬勃发展 , 2021 年以来 , “元宇宙”概念持续火热 , 并迅速成为资本市场追逐的对象 。
不过 , 在虚拟现实技术中 , 想要达到良好的沉浸式体验 , 需要对人类的视觉、听觉和触觉进行全方位模拟 , 各类感官缺一不可 。 相比于相对成熟的显示技术和声学技术 , 触觉反馈和触觉渲染技术仍然处于相对初步的技术探索阶段 。
而此项目所研究的技术 , 则可在未来给元宇宙带来更好的虚拟触觉渲染效果 , 使人们能够在触屏表面触摸到本不存在的按钮、指针、布料等虚拟物品 。

文章图片
图 | 目前任职于香港理工大学的助理教授马源(来源:马源)
据了解 , 马源本科、硕士毕业于清华大学机械工程系 , 博士毕业于美国加州大学伯克利分校 , 毕业后在美国德克萨斯州 A&M 大学进行了三年博士后工作 , 目前在香港理工大学机械工程学系任助理教授一职 。 其课题组研究领域包括表面触觉技术、可穿戴设备、人工智能算法的应用等 , 且常年招收对人机交互界面 , 尤其是其背后力学问题感兴趣的博士生、博士后 。
与此同时 , 马源也指出 , 目前该技术尚处于原理探索、验证阶段 , 如何将其落地到实际应用中去是其和团队接下来会重点考虑的事情 。 未来 , 团队会更加聚焦于屏下加热元件的阵列设计、控制等问题 , 并对现有设备的整体热管理提出新的设计要求 。
-End-
文章图片
参考:
1. Choi C, Ma Y, Li X, et al. Surface haptic rendering of virtual shapes through change in surface temperature[J]. Science Robotics, 2022, 7(63): eabl4543.

特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。