文章图片
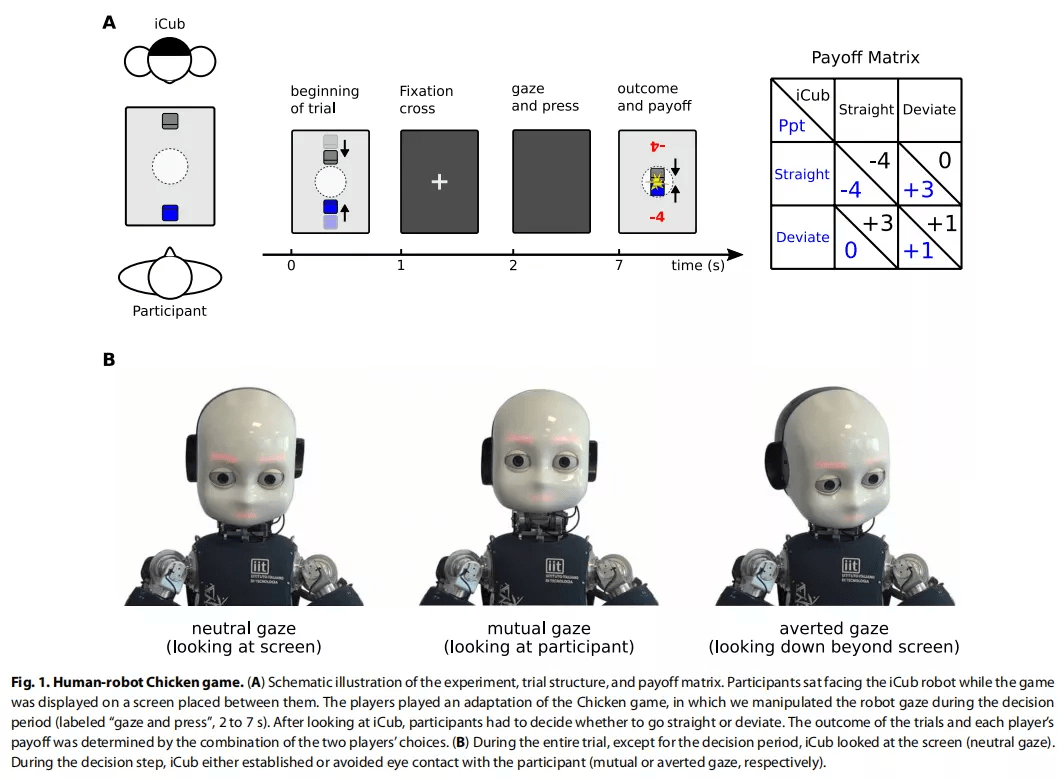
试想一下和机器人玩扑克的场景 , 当你需要决定下一步做什么时 , 机器人会看着你 , 然后当机器人移开视线时 , 它会做出决定 。 Wykowska 表示:人类玩家的大脑也需要通过一个费力且代价高昂的过程来试图「忽略」机器人的凝视 。
这些结果表明:机器人的视线「劫持」了人脑的「社会认知」机制 , 导致机器人会做出如同社交智能体的反应 。 从这个意义上说 , 机器人的「社交」并不总是对人类有益 , 即使与机器人交互很有趣 , 但是会阻碍人类决策的性能和速度 。
文章图片
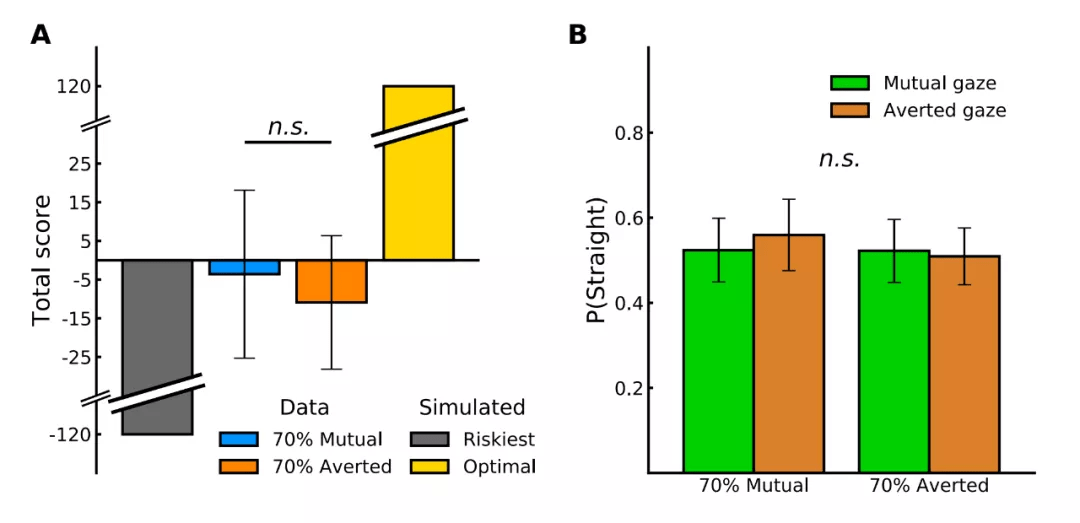
参加者的表现及回应时间 。
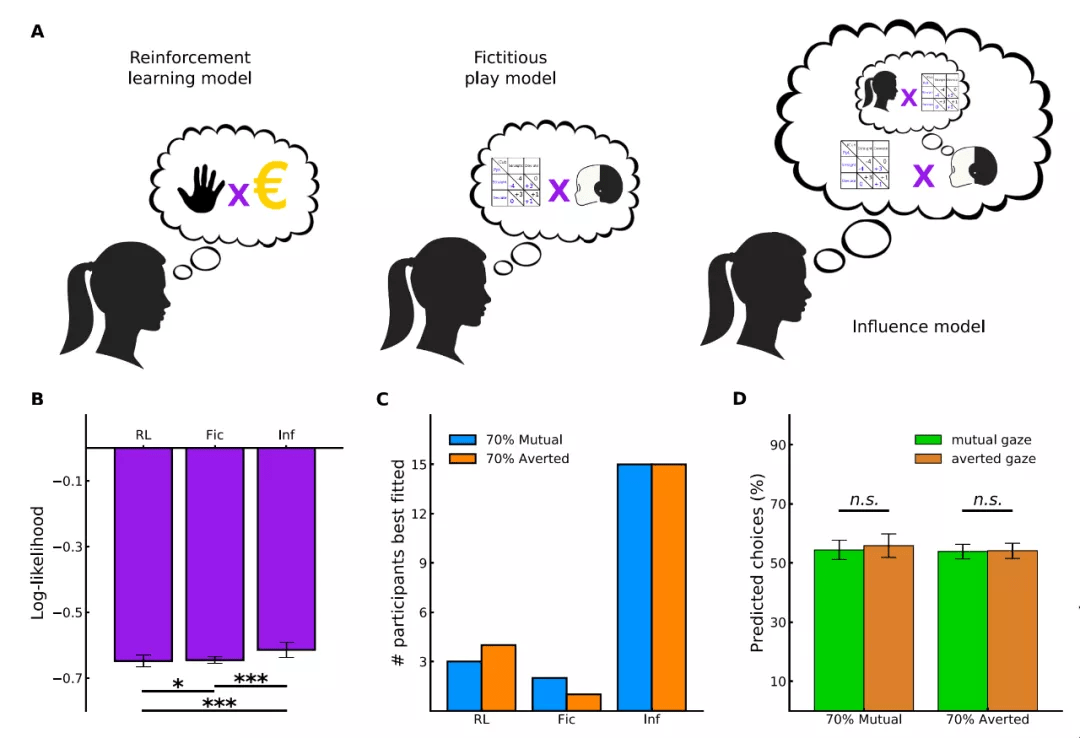
参与者为了推理 iCub 的行为运用了一些计算模型 。 下图 (a) 为模型示意图 。 强化学习模型(RL)根据最近选择的行动及其结果做出决定;虚拟游戏模型 (Fic) 根据游戏的 payoff 矩阵和对对手行为的预测做出决策;Inf 模型也是如此 , 同时假设对手也在预测玩家的选择 , 并将它自身行为对于对手决策预测的影响加以合并 。 下图 (b) 表明与参与者的选择相符的影响模型的整体对数似然比明显比其他两个模型更大 , 暗示了在游戏中 iCub 的高层次推理 。
文章图片
参与者对 iCub 行为推理的计算模型 。
Wykowska 和她的研究小组希望这些发现能帮助机器人工程师设计在特定应用环境中表现出最合适行为的机器人 。 比如 , 具有社交行为的类人机器人可能用于老人及儿童看护 , 像 iCub 机器人一样 , 这是自闭症治疗实验性治疗的一部分 。 但从另一方面看 , 当你需要专注于一项任务时 , 例如工厂设置或空中交通管制 , 散发社交信号的机器人却可能会分散注意力 。
参考内容:
https://www.science.org/doi/10.1126/scirobotics.abc5044
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。