
文章插图
虽然4D成像雷达在感应能力上不如激光雷达,但4D毫米波雷达有个非常明显的优点,那就是可以很好地适应极端天气 。它在雨雾天气下的侦测范围依然可以达到数百米,这一点可以很好地弥补激光雷达的天然缺陷 。
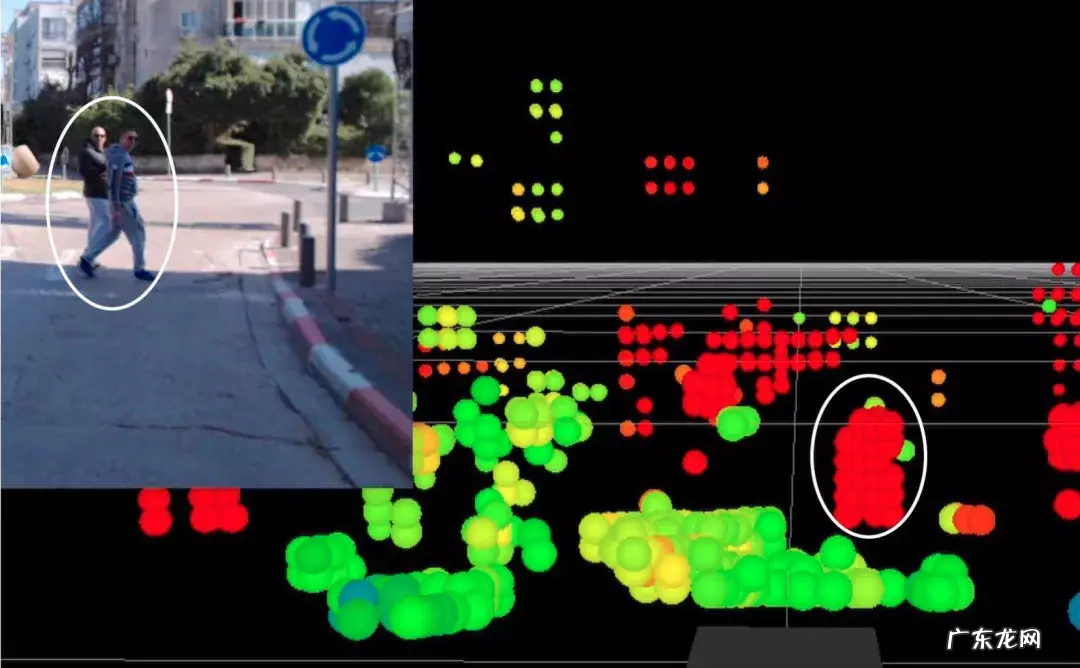
Phoenix雷达也确实符合马老板的预期,比如Phoenix可以将特斯拉原有毫米波雷达的探测范围扩大约一倍,直接达到300米 。还能实现对行人、自行车和摩托车等小型实体的准确检测和跟踪 。
文章插图
用马斯克的话来讲,在绝大部分的情况上纯视觉方案已经够用了,但是在极端天气方面纯视觉就有点不够用了,此时加入一个高分辨率的毫米波雷达,弥补视觉方案上的不足,也算是理所应当 。
02
纯视觉的路,不好走了吗?
坚持“第一性原理”的马斯克,一直认为人都是靠两个眼睛开车的,AI为什么不可以?
但理想丰满,但现实骨感,受限于摄像头对距离探测的弱势,以及对于静止物体的识别不清,纯视觉目前还存在很大的问题 。
虽然特斯拉的FSD已经足够强大,但实际表现并不出色,甚至还因为一些“幻影制动”的问题频繁被告上法庭 。
不过马斯克从生理上就排斥雷达,2019年特斯拉的”Autonomy Day”上,马斯克就直接公开向激光雷达开炮“激光雷达就像是人身上长了一堆阑尾,是傻子的玩意,任何人用激光雷达都注定失败 。”
2021年3月,马斯克在一条推文中表示,特斯拉将转向“纯视觉”的方式 。两个月后,特斯拉宣布,从当月开始交付的所有Model 3和Model Y汽车将用特斯拉的纯视觉系统取代雷达传感器,也就是取消了原先的毫米波雷达 。
今年2月,特斯拉再次宣布,从2月中旬开始生产的所有Model S和Model X,也将只配置纯视觉系统,不再使用任何雷达来执行其功能 。今年10月,在北美、欧洲、中东和台湾制造的Model 3和Model Y上拆除了12个超声波传感器 。
至此,特斯拉传感器方案从“8摄像头+1毫米波雷达+12超声波雷达”的多传感器方案减为“8摄像头”的纯视觉方案 。
对于雷达,马斯克一直在做减法,但是自转为纯视觉驱动后,国外有不少特斯拉车主表示,车辆莫名其妙刹车的情况开始增加,即便车前什么都没有,但车辆却突然开始减速,也就是“幻影制动” 。
毫米波雷达能让自动驾驶系统确定前方是否有车,该车是否在移动 。极大程度的减少误报和漏报,漏报有可能导致碰撞;误报则是前方无车却突然制动,雷达的引入有望同时降低这两种问题的发生几率 。
像一些毫米波雷达,成本也不算贵,嘴硬的马斯克,最终没有抵挡住这些负面舆论,坦然接受其雷达的好处 。
而接下来将会搭载雷达的新车,有可能就是明年的新款Model 3 。

文章插图
前不久,外媒已经开始报道新版Model 3的原型车,内部代号为 Project Highland,不过 Semi卡车和赛博皮卡也有可能搭载雷达 。
03
安全冗余并不多余
纯视觉自动驾驶的大旗,马斯克还能扛多久?
不久前,网络上流传了一段关于车辆自动驾驶的视频,在视频里的测试项目中,很多硬件传感器配置远高于特斯拉Model 3的国产车型,自动驾驶表现上却不及Model 3 。

文章插图
这么看来,堆硬件与提升自动驾驶技术之间并不能划等号 。
特斯拉虽然在自动驾驶上的硬件简洁,却不输当下任何一家车企的底气在于其越来越强大的芯片算力 。
- 美国小鹏将入华开卖!刚被马斯克吐槽会倒闭,顶配车售价107万
- 随时可以干的游戏世界 一开始就可以干人的游戏推荐手机
- 刀锋之影最强出装 lol刀锋之影出装
- 有情鸳鸯无情剑 郎情妾意剑是哪里的
- 淘宝店铺运营的优缺点介绍,有哪些?
- B站现在的收益是不是很低?转载有收益吗?
- 亚马逊的站点有哪些?站点怎么选择?
- 大门朝东颜色有什么讲究 大门朝东门什么颜色的风水好
- 风水龙脉图解 风水龙脉结穴倚穴图片
- 燕子搭窝说明有风水吗 金腰燕窝的风水
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。