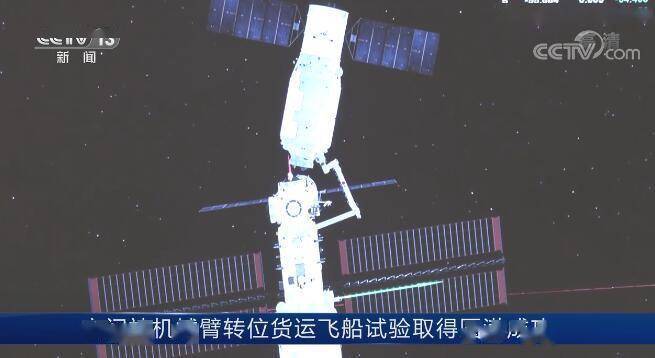
今天(1月6日)6时59分 , 经过约47分钟的跨系统密切协同 , 空间站机械臂转位货运飞船试验取得圆满成功 , 这是我国首次利用空间站机械臂操作大型在轨飞行器进行转位试验 。
文章图片
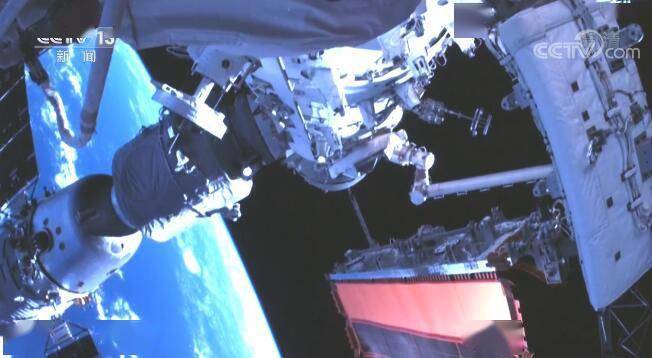
1月6日凌晨 , 机械臂成功捕获天舟二号货运飞船 。 6时12分 , 转位试验开始 , 天舟二号货运飞船与天和核心舱解锁分离后 , 在机械臂拖动下以核心舱节点舱球心为圆心进行平面转位;而后 , 反向操作 , 直至货运飞船与核心舱重新对接并完成锁紧 。
文章图片
此次试验初步检验了利用机械臂操作空间站舱段转位的可行性和有效性 , 验证了空间站舱段转位技术和机械臂大负载操控技术 , 为后续空间站在轨组装建造积累了经验 。
那么 , 什么是转位试验 , 转位试验的目的是什么呢?一起来了解一下 。
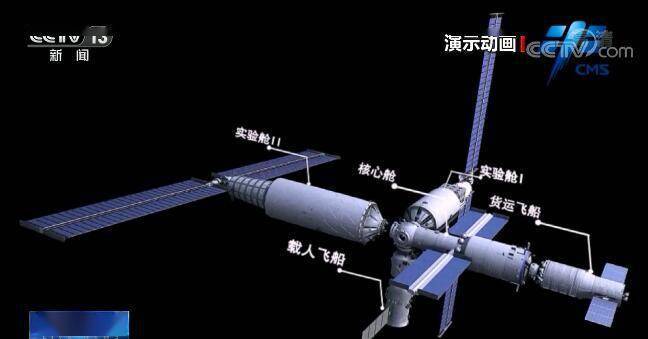
我国的空间站并不是一次性发射成型的 , 而是需要通过多次发射 , 在太空中组装建造而成 。 目前 , 我们已经陆续发射了天和核心舱、天舟货运飞船、神舟载人飞船 , 后续还将发射两个实验舱 。
航天科技集团五院空间站总体副主任设计师 史纪鑫:我们正常的建造过程中 , 两个实验舱都是对接到前向对接口的 , (实验舱Ⅰ对接到)前向对接口以后 , 相当于它(实验舱Ⅰ)停在这以后 , 等实验舱Ⅱ来的时候 , 它要把这个位置给让出来 。
文章图片
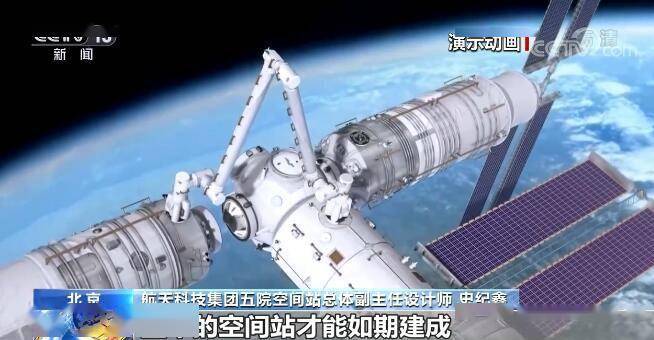
史纪鑫告诉我们 , 为了确保之后发射的两个实验舱能够顺利完成舱段转位任务 , 需要提前开展在轨转位关键技术验证 。 这次天舟二号的转位试验就是为了这个目的 。
文章图片
航天科技集团五院空间站总体副主任设计师 史纪鑫:如果转位不成功或者没有这个功能的话 , 我们整个的规模可能就受限了 , 这个过程其实是整个空间站建造必须要突破的一项技术 。 我们只有把技术突破了 , 整个空间站才能如期建成 。
在完成了今天的转位试验之后 , 天舟二号货运飞船下一步将配合航天员完成手动遥操作试验 。 任务全部结束之后 , 将择机再入大气层 。
2021年5月29日 , 天舟二号货运飞船在海南成功发射 , 作为空间站建设阶段货运飞船的首发船 , 天舟二号不仅携带大量的航天员生活物资、舱外航天服、科学仪器等重要物资 , 还承担了空间站推进剂补加的任务 。
【天舟二号下一步将配合航天员完成手动遥操作试验】
文章图片
2021年9月18日 , 天舟二号货运飞船从空间站天和核心舱后向端口分离 , 并绕飞至前向端口完成自动交会对接 , 在完成今天的转位试验之后 , 天舟二号下一步将配合航天员完成手动遥操作试验 。
航天科技集团五院天舟二号货运系统总体主任设计师 杨胜:就是航天员在核心舱控制货运飞船 , 然后进行手动遥控的撤离和对接实验 。 现在货船交会对接有两种模式 , 正常的话是自动交会对接 , 如果出现异常情况 , 我们还有手控遥操作的备份手段 , 这个实际上主要是为备份的手段做一个在轨验证 。
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。