
文章插图
图4 伺服电机
减速器通常用作原动件与工作机之间的减速传动装置,起到匹配转速和传递转矩的作用,一般由封闭在刚性壳体内的齿轮传动、蜗杆传动、齿轮-蜗杆传动组成,是机器人传动机构的核心部件之一,如图5所示 。机器人领域常用的精密传动装置主要有轻载条件下的谐波减速器和重载条件下的RV减速器 。谐波减速器具有轻量小型、无齿轮间隙、高转矩容量等优点,但其精度寿命较差,主要是由于在高度循环的交变应力情况下柔轮极易出现疲劳失效,通常应用在关节型机器人的末端执行等轻载部位;RV减速器主要包含了行星齿轮与摆线针轮两级减速两个部分,具有减速范围宽、功率密度大、运行平稳等优点,已成为工业机器人最常用的精密减速器 。设计高性能/高精度机器人专用减速器需综合考虑传动精度、齿廓修形、扭转刚度以及回差等技术指标 。
文章插图
图5 减速器
当前,我国高性能伺服电机、减速器等关键零部件的设计制造技术与外国相比,在可靠性、精度、动态反应能力等方面存在一定差距,是制约我国工业机器人发展的瓶颈之一 。
3)集成应用技术
集成应用技术是指以提升工业机器人任务重构、偏差自适应调整能力,提高机器人人机交互性能为目标的机器人技术 。主要有:基于智能传感器的智能控制技术、远程故障诊断及维护技术、基于末端力检测的力控制及应用技术、快速编程和智能示教技术、生产线快速标定技术、视觉识别和定位技术等 。视觉识别定位技术是其中的代表性技术 。
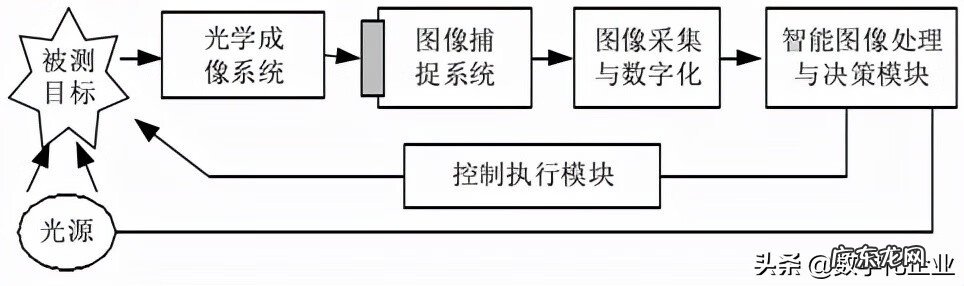
视觉识别和定位技术是一项涉及人工智能、图像处理、传感器技术和计算机技术等多领域的综合技术,与工业机器人结合非常紧密,广泛地应用在工业生产中的缺陷检测、目标识别与定位和智能导航等方面 。典型的视觉应用系统包括图像捕捉、光源系统、图像数字化模块、数字图像处理模块、智能判断决策模块和机械控制执行模块,如图6所示 。
文章插图
图6 视觉应用系统
视觉识别和定位技术在工业机器人领域的应用主要以下3个方面:
(1)视觉测量:针对精度要求较高(毫米级甚至为微米级)的零部件,使用人的肉眼无法完成其精度测量,通过引入视觉非接触测量技术构成机器人柔性在线测量系统,能够有效获取零部件表面质量和基本尺寸信息 。
(2)视觉引导:基于机器视觉技术能够快速准确地找到目标零件并确认其位置,采用模式识别的方式,在三维图像中获取目标点或目标轨迹引导工业机器人抓取、加工等操作,提高生产智能化程度,实现自动化作业 。
(3)视觉检测:通过机器视觉检测完成产品的制造工艺检测、自动化跟踪、追溯与控制等生产环节,识别零件的存在或缺失以保证部件装配的完整性,判别产品表面缺陷以保证 生产质量 。
视觉识别和定位技术的应用使得工业机器人能够适应复杂工业环境中的智能柔性化生产,大大提高了工业生产中的智能化和自动化水平 。工业机器人的关键技术推动了机器人产品的系列化设计和批量化制造 。
4
工业机器人
在智能制造中的应用
在智能制造领域,多关节工业机器人、并联机器人、移动机器人的本体开发及批量生产,使得机器人技术在焊接、搬运、喷涂、加工、装配、检测、清洁生产等领域得到规模化集成应用,极大地提高了生产效率和产品质量,降低了生产和劳动力成本 。
- 门对门中间摆什么最旺 自己家放什么可以镇住对门风水好的
- 板栗子如何去皮 栗子去皮机器
- 便利店拿货 自己做便利店进货渠道
- 如何把自己的网站推广出去 怎样推广自己的网站
- 怎么买车保险 自己怎么买汽车保险
- 冒险岛海盗装备 冒险岛海盗职业
- 自己新居入伙祝福语四字 亲戚新居入伙祝福语简单
- 怎么查看历史信息 手机历史记录怎么查
- 淘宝店铺需要几个人?开网店需要几个人?
- 自制雪糕的简单方法 自己怎么制作雪糕简单方法
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。