
文章图片
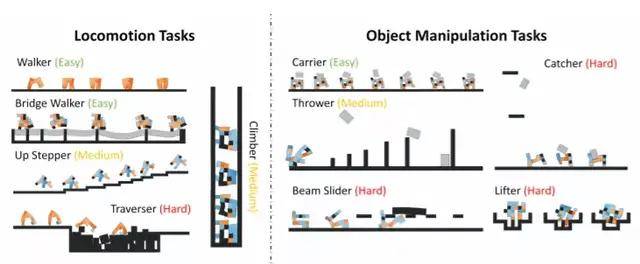
图 | 往上爬(来源:NeurIPS 2021)
Evolution Gym 中的机器人看起来像是柔软、可移动的俄罗斯方块 , 整体呈网格状结构 , 由许多个“细胞”作为基本单元组成 , 其中包括可以自由形变的软体细胞、坚硬的刚体细胞、以及可以主动收缩或扩张的致动器细胞 。 这种灵活的形态 , 使得机器人可以自由“进化”其形状 , 最终在不同地形上完成一系列运动和操纵物体等任务 。
这种可同时“进化”形态与控制的算法被称为协同设计(co-design) 。 具体而言 , 田韵声团队用深度强化学习去优化机器人的控制 , 并采用遗传算法、贝叶斯优化等方法 , 根据控制器的表现作为反馈信号来优化机器人的形态 。 整个进化过程是在控制优化和形态优化之间不断迭代进行 , 机器人可以像人类一样在环境中通过反复试验不断理解任务 , 并最终进化出更适合任务的形态 。
文章图片
(来源:NeurIPS 2021)
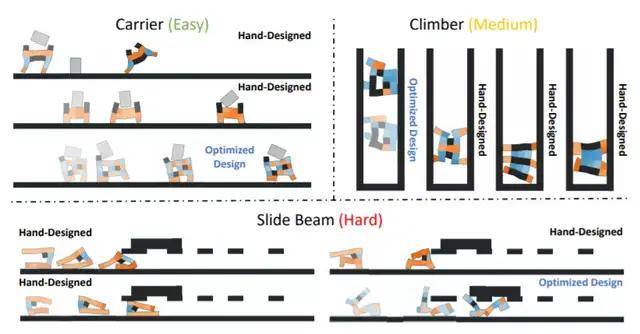
尽管机器人是从头开始自主进化的 , 并且除了任务本身之外 , 没有任何人类提供的先验知识 , 但在“进化”的过程中 , 它们经常会“进化”出一些类似于现有自然生物的器官或是整体形态 , 同时性能优于人工设计的机器人 。
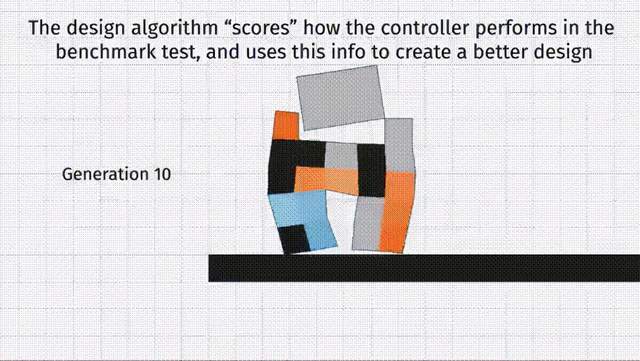
如下图所示 , 搬运工机器人在优化到第 10 代的时候 , 不光进化出了两条腿 , 还在身体上方进化出了个凹槽用来放置物体 , 并能搬运物体向前移动 。 在优化到第 30 代时 , 在成功搬运物体的同时 , 它的跑速已比第 10 代快得多 。
文章图片
(来源:NeurIPS 2021)
田韵声表示 , 虽然学界已有团队尝试共同进化机器人的形态和控制 , 但只集中于一些较小规模的测试相对以及简单的任务 , 此前尚无大规模测试平台可涵盖几十种复杂多样的任务 。 并且 , 他和团队在 Evolution Gym 平台上测试、评估了当前最前沿的算法 , 结果发现虽然它们能对简单任务“进化”出合理的机器人形态 , 但是在困难任务上比如穿越崎岖不平且晃动的地面时 , 这些算法仍然难以优化出能成功完成任务的机器人 。
所以该研究的两个最终目的是:一是希望 Evolution Gym 可作为一个初步实验平台 , 从最基本的细胞结构开始 , 帮助研究人员发掘出更智能、更高性能的机器人形态 , 甚至是很多全新的、意想不到的形态 , 并且反过来“指导”人类去设计高性能机器人;二是作为一个大规模基准测试平台 , 它可帮助人们开发出更强大的人工智能算法 , 以便进行高效协同设计 , 从而让机器人快速进化到足以完成最具挑战性的任务 。
文章图片
(来源:NeurIPS 2021)
由两位MIT本科生牵头并推进项目 田韵声表示 , 他们的出发点是希望通过一个标准化大规模的平台 , 来对领域内最前沿的水平做出严谨衡量 , 并通过快速物理模拟、以及多样任务设计 , 来给研究人员提供方便 。
因此 , 从一开始研究目标和任务都很明确 , 当实验室大多数博士生忙于自己的项目时 , 田韵声所在团队联系了两位 MIT 本科生 , 也就是前文的贾格迪普·巴蒂亚(Jagdeep Bhatia)和霍利·杰克逊(Holly Jackson)来牵头并推进项目 。
贾格迪普花了几个月时间从头写了模拟系统 , 霍利这边开发出了很多有意思的环境 。 田韵声则和实验室另外一名师兄徐捷指导他们 , 共同实现算法并撰写论文 。
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。