2
智慧化道路要提升道路规则的显著性
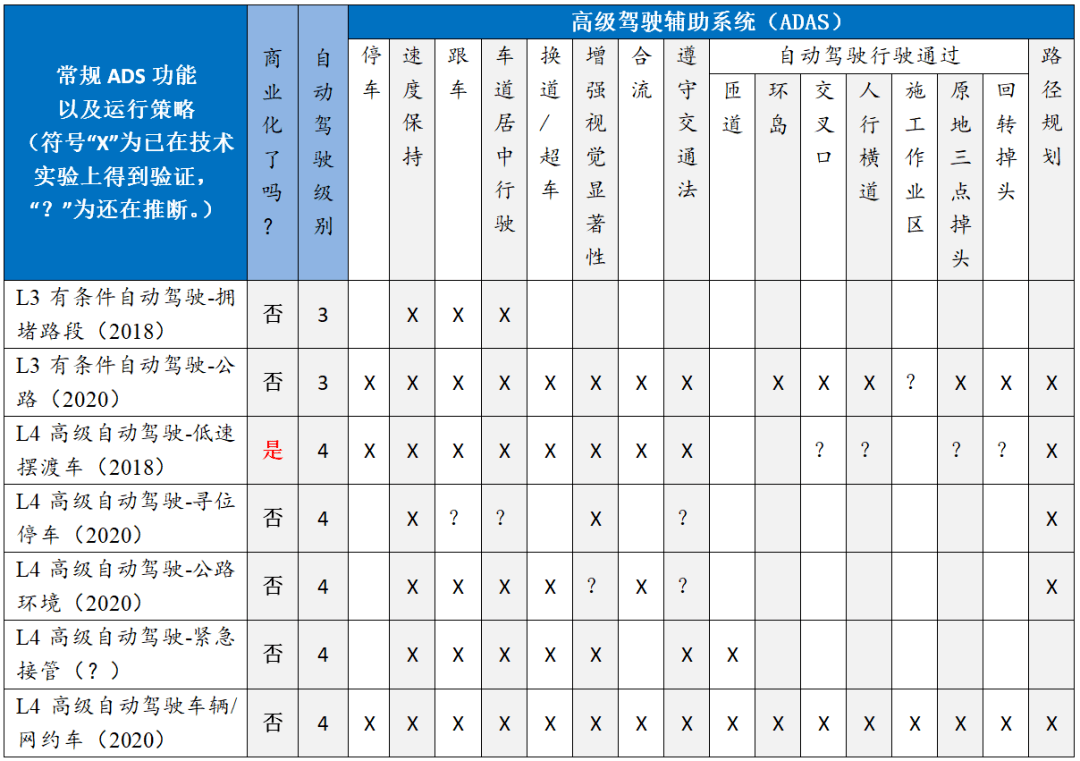
自动驾驶车辆如果检测到交通事件 , 譬如前车刹车或自己想变道 , 下一步就会如同人类驾驶人一样 , 有一系列驾驶任务(Dynamic Driving Task , DDT)要执行 。 当前的自动驾驶通常也会用高级驾驶辅助系统(ADAS)的功能来描述 , 有时不区分这两者的区别(见图2) 。
文章图片
图2:表中列出了自动驾驶已验证或推断的功能 , 以及其与高级驾驶辅助系统(ADAS)的应用对应关系 。 (souce: https://www.nhtsa.gov/sites/nhtsa.gov/files/documents/13882-automateddrivingsystems_092618_v1a_tag.pdf)
备注:笔者在 《评判一辆车的“聪明”程度 , 关键看什么?》 一文中 , 已说明了自动驾驶和高级驾驶辅助系统(ADAS)的关系 。 本文后续说明中 , 自动驾驶和高级驾驶辅助系统(ADAS)的含义不做区分 。 此外 , 越来越多的ADAS车辆同时也具备网联功能 , 本文也会混用网联车辆和装有网联功能的自动驾驶车辆的表述 。
自动驾驶车辆的驾驶任务 , 可总结为以下六类:
①通过转向 , 控制车辆横向运动;
②通过加减速 , 实现车辆纵向运动控制;
④针对目标和事件的响应执行;
⑤驾驶任务的整体策略规划;
⑥通过灯光、信号和车辆姿态 , 增强驾驶行为的显著性(conspicuity) 。
我们通过一个例子来理解上述驾驶任务:有停进停车位的驾驶任务 , 这个驾驶任务一般持续十几秒到一两分钟 。 自动驾驶车辆需要了解停车场所的信息 , 并为其完成整个过程做明确的行为规划 。 这里就是上述第5条的含义 。 在开始执行停车这个驾驶任务的过程中 , 驾驶任务会细分为许多子任务 , 譬如控制转向和车速 , 逐步对准车位 , 这是第1、2条;监测车位附近的物体 , 是否有人经过 , 适时调整 , 这是第3、4条 。 如果车位上突然跑进来一只小动物(猫、狗)挡住车辆 , 就要按动喇叭、打开双闪 , 表达要停进来的目的 , 这是第6条 。
无论在高速公路还是城市道路行驶 , 自动驾驶车辆和人类驾驶人的驾驶任务分析方法并无本质区别 。 由于机器视觉系统在识别和逻辑判断能力上不如人类驾驶人 , 智慧化道路需要在道路本身信息的显著性上需更清晰和准确 。 这主要体现在道路的路面、交通标志、标线、信号设施的识别上 , 也体现在当地道路管理政策的逻辑合理性上 。 道路信息 , 如标志、标线、信号灯的显著性是当前道路智慧化的重头戏 。 因此 ,智慧化道路的智慧应体现在规则易读、逻辑明显且严谨上 , 这是“ 新用路人”对道路智慧化的第二点需求 , 即提升道路规则的显著性 。随意设置的声光电设施和杆件 , 其带来的光线、色彩、明暗阴影 , 使道路上的信息传递变得复杂 , 无论对人类驾驶人还是自动驾驶而言 , 都是有害的做法 。
3
加强数据管理和使用能力 , 改进运输系统和交通管理制度
行业对网联车辆或具有网联功能的车辆更多的关注是商业应用的发展 , 对安全能力的关注不如前者 。 车联网或类似技术 , 从上世纪九十年代就开始应用在车辆上 , 一直不温不火 。 而近十年的移动互联网商业模式的兴起 , 以及高级驾驶辅助系统(ADAS)的普及 , 已给网联车辆发展找到了路径 。 无疑 , 道路智慧化的一个方向也会与移动互联网、网联车辆有关 。
网联车辆可以产生大量数据 。 根据研究 , 平均每辆运行的汽车每天可产生30TB的数据 。 这些数据主要有四类:一是车辆内部传感器产生的数据 , 如速度、方向、地理位置、总里程、空闲时间、燃料消耗等; 二是车辆周边交通情况 , 如是否拥堵、行人多不多等; 三是车辆途经的道路和交通设施情况 , 譬如红灯要多长时间、道路是否在施工等; 四是与车辆连接的外围设备数据 , 如车主连接的智能手机 。
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。