enet研究院 enet研究院enet网络学院(enet硅谷动力学院)雷锋网2019-02-26 10:14:15
本文为 AI 研习社编译的技术博客 , _原题为 :
ENet — A Deep Neural Architecture for Real-Time Semantic Segmentation
作者 |Arunava
翻译 | callofduty890
校对 | 酱番梨 审核 | Pita 整理 | 立鱼王
原文链接:
https://towardsdatascience.com/enet-a-deep-neural-architecture-for-real-time-semantic-segmentation-2baa59cf97e9

文章插图
Fig 1. A conversation between a semantic segmented guy and a toon
这是该论文的论文摘要:
ENet:用于实时语义分割的深度神经网络体系结构
作者:Adam Paszke
论文:
https://arxiv.org/abs/1606.02147
概论 ENet(高效神经网络)提供了实时按像素进行语义分割的能力 。 ENet的速度提高了18倍 , FLOP要求减少了75倍 , 参数减少了79倍 , 并且为现有模型提供了类似或更好的精度 。 在CamVid , CityScapes和SUN数据集上测试 。

文章插图
方法:
文章插图
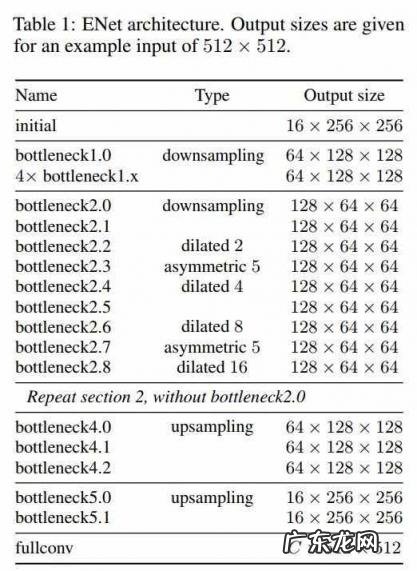
图3. ENet架构
以上是完整的网络架构 。
它分为几个阶段 , 由表格中的水平线和每个块名称后的第一个数字突出显示 。 报告输出尺寸为输入图像分辨率512 * 512

文章插图
图4. ENet的每个模块都有详细说明
视觉表现:
– 初始模块是(a)中所示的模块- 并且瓶颈模块显示在(b)
每个瓶颈模块包括:
– 1×1投影 , 降低了维度
– 主卷积层(conv)( – 常规 , 扩张或完整)(3×3)
– 1×1扩展
– 并且它们在所有卷积层之间放置批量标准化和PReLU
如果瓶颈模块是下采样 , 则将最大池化层添加到主分支 。 此外 , 第一个1×1投影被替换为2×2卷积 , stride = 2 。
它们将激活无填充以匹配要素图的数量 。
conv有时是不对称卷积 , 即5 * 1和1 * 5卷积的序列 。
【enet研究院 enet研究院】对于正则化器 , 他们使用Spatial Dropout:
– 在瓶颈2.0之前p = 0.01
– 完成之后p = 0.1
所以 ,
文章插图
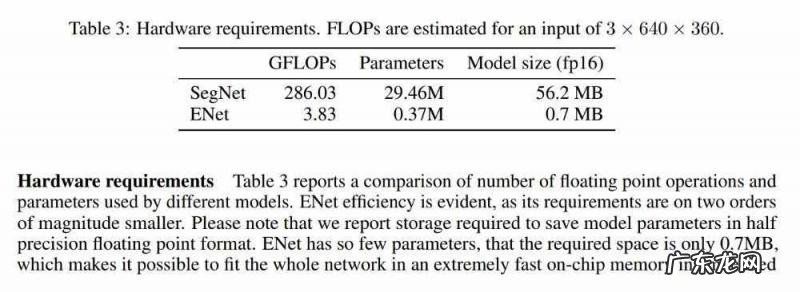
图6. SegNet和ENet的硬件要求
基准 使用 Adam.ENet非常快速地融合 , 在每个数据集上 , 使用4个Titan X GPU , 训练只需要3-6个小时 。 分两个阶段进行:
– 首先 , 他们训练编码器对输入图像的下采样区域进行分类 。
– 然后附加解码器并训练网络以执行上采样和像素分类 。
学习率 – 5e-4
L2重量衰减为2e-4
批量大小为10
自定义类权重方案定义为
文章插图
图7所示 。 自定义类权重方案的公式
其中c = 1.02并且类权重被限制在[1,50]的区间内
文章插图
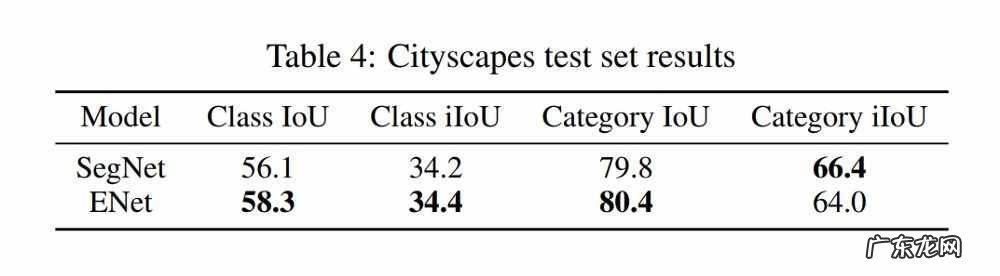
图8. CityScapes数据集的性能
文章插图
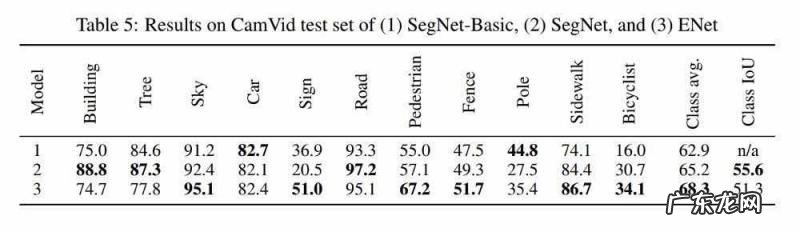
图9. CamVid数据集的性能
参考: A. Paszke, A. Chaurasia, S. Kim, and E. Culurciello. Enet: A deep neural network architecture for real-time semantic segmentation. arXiv preprint arXiv:1606.02147, 2016.
- 广汽集团汽车工程研究院 程志伟 广汽集团汽车工程研究院
- 彩铃|注意!元宇宙与虚实交互联合研究院在沪成立
- 海珠分院 鱼美人减肥研究院
- 南洲分院 鱼美人减肥研究院
- Bottega Veneta宝缇嘉是什么时候,由谁创造的
- 张掖市林业科学研究院离黑河森林公园多远
- 2019胡润艺术排行榜 2021胡润中国艺术排行榜
- 新春走基层 HRG合肥研究院:打通研发和应用 “合肥模式”成效初显
- 合肥 哈工大机器人国际创新研究院:打通研发和应用“合肥模式”成效初显
- 上海十大人才市场排名
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。