比如远距离条件下微波雷达是主导 , 当距离缩短至10至20公里时激光雷达进一步获取更加精确的测距测角信息 , 保证对接精度 , 当距离缩短至250米至0.9米时 , CRDS光学成像敏感器发射激光光源对空间站对接口处安装的目标标志器进行照射 , 目标标志器再将入射光源原路返回 , 追踪飞行器获取目标标志器图像信息 , 进而解算出空间站的相对位置和姿态角信息 。
文章图片
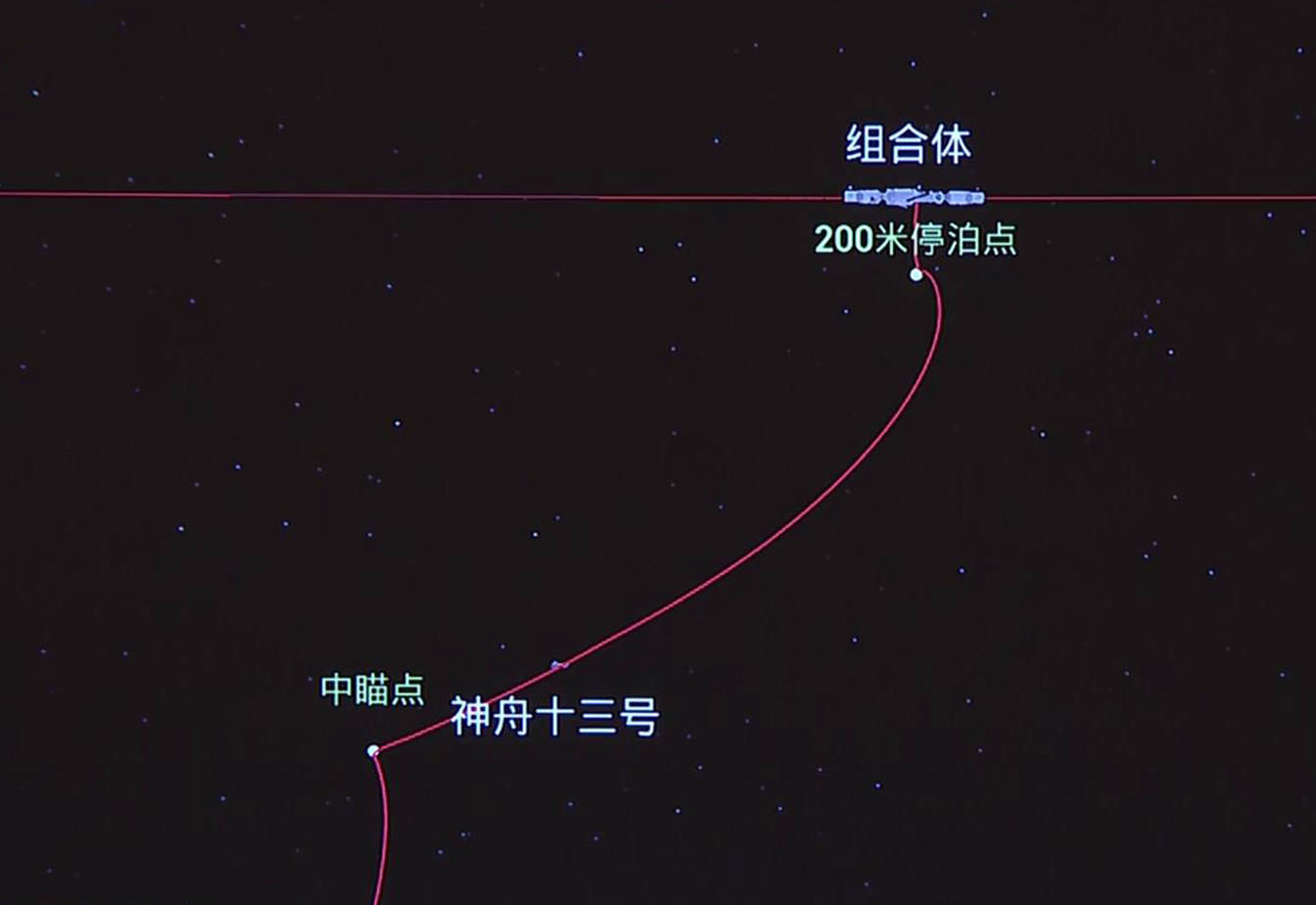
由中瞄点出发实现前向/后向/径向快速对接
以往轴向对接停泊点需要飞船不断地微调升降轨道进行瞄准测试 , 不仅费时(延长对接用时)而且费力(消耗推进剂) , 为了适应空间站多对接口与快速交会对接需求 , 工程团队在空间站后下方创新设置了中途瞄准点(简称中瞄点) , 飞船抵达该特征指示点后即可快速实现前向、后向、径向对接 , 不再需要多次变轨瞄准 , 中瞄点就好比是一个太空中转站 。
反观国际空间站则主要是轴向对接 , 虽然该站也有不少径向对接口 , 但也主要是通过调整空间站姿态配合飞船进行轴向对接 。
神舟十三号抵达中瞄点进行相关状态确认后继续向200米停泊点转移 , 转移过程中飞船逐步调整至直立姿态 , 到达200米停泊点后飞船沿轴向旋转180度(滚动调姿) , 旨在建立瞄准姿态 , 完成调姿后飞船继续向19米停泊点转移 , 然后是最后靠拢段飞行 。
文章图片
神舟十三号过中瞄点
文章图片
神舟十三号完成俯仰调姿后视场中的天宫空间站
文章图片
神舟十三号沿轴向旋转180度过程中空间站视角的变化
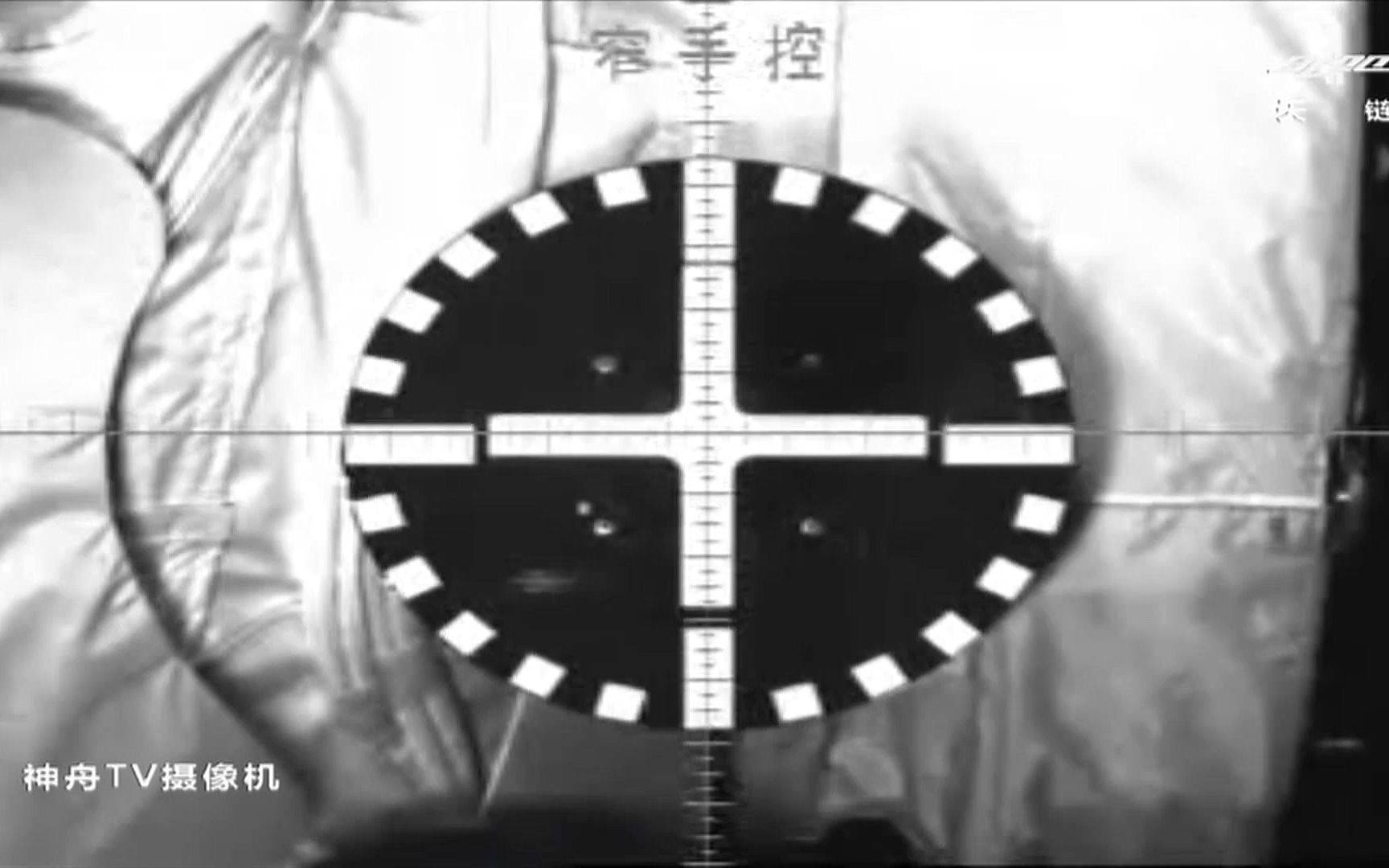
在最后靠拢段航天员可以通过TV摄像机画面监控对接状态 , 一旦自动对接系统出现较大偏差 , 可以立即转手动对接 。

文章图片
神舟十三号从200米停泊点转进19米停泊点 , 天宫空间站越来越近
文章图片
神舟TV摄像机镜头画面
当飞船对接环与径向对接口接触后即标志着对接机构捕获 , 尔后就是对接机构之间的缓冲、拉近、锁紧 , 这个过程耗时约15分钟 。

文章图片
神舟十三号对接环与空间站径向对接口接触
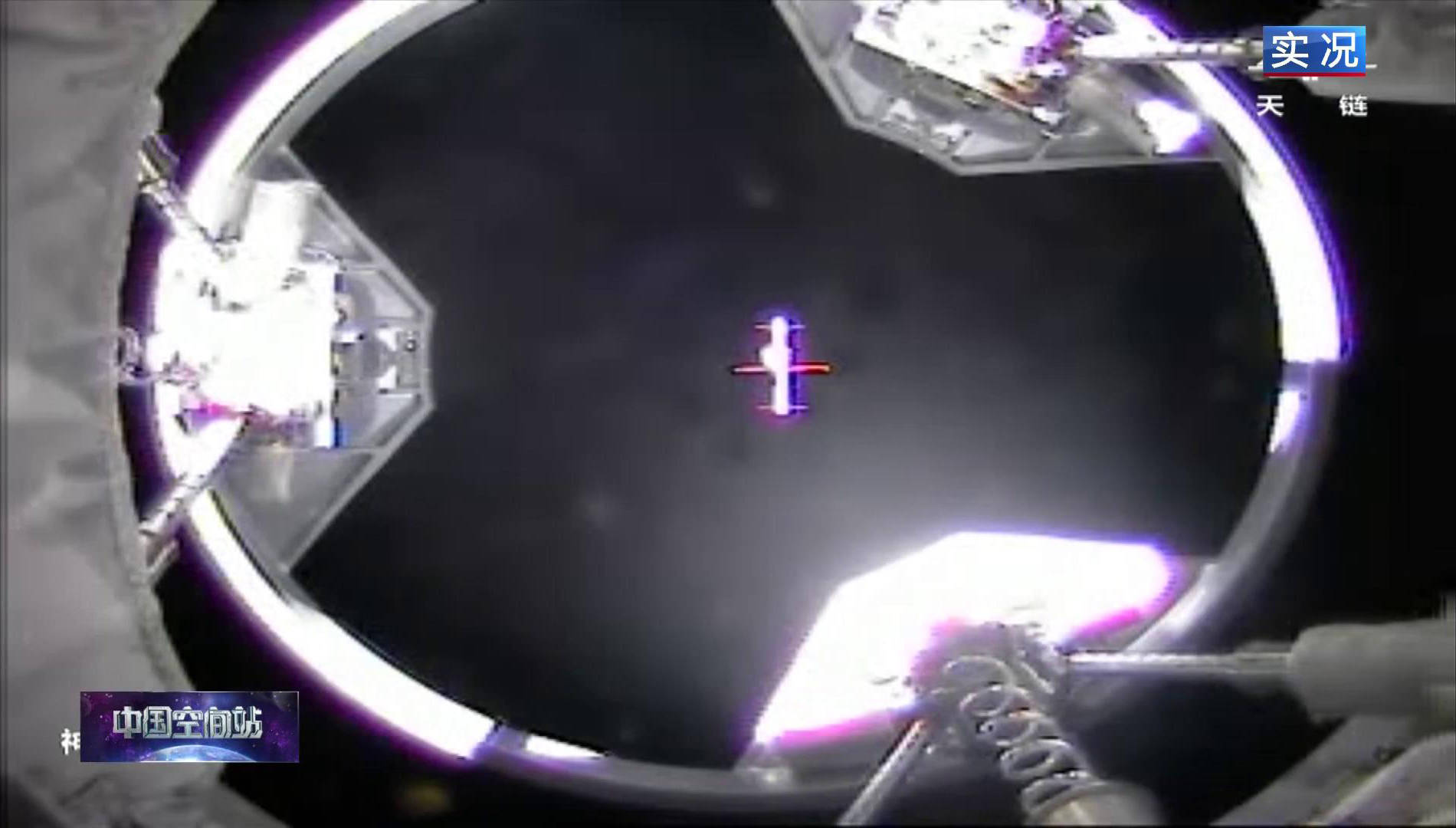
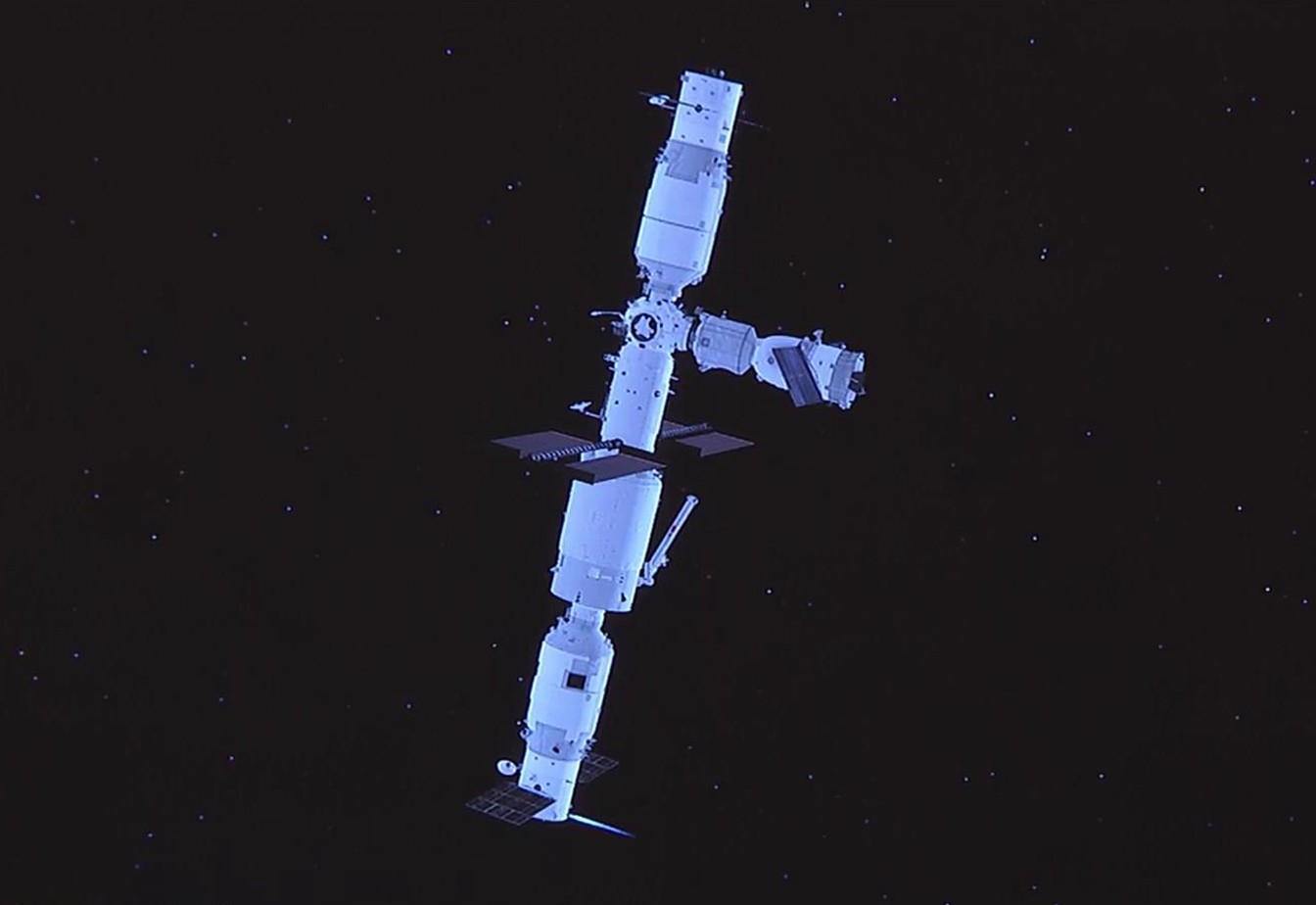
完成锁紧后神舟十三号与空间站就建立了刚性连接 , 此时有两个画面值得关注 , 一个是天和核心舱舱外摄像机解锁的神舟飞船在轨新视角 , 这应当是神舟飞船自首次飞行以来在太空呈现的最为高清的画面 。

文章图片
径向对接解锁的神舟飞船在轨新视角
另一个画面就是飞控大厅展示的空间站组合体运行画面 , 画面显示组合体姿态出现了较大幅度的倾斜 , 事后据透露倾斜角度超过了70度 , 这是因为径向交会对接属于偏离质心对接 , 而异体同构周边对接装置又有着较大的撞击能量 , 因此出现了这一情况 , 当然这都是设计状态 , 并不是异常情况 。
文章图片
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。