或许明年就是软体机器人真正开始爆发的一年 。

文章图片
在动画《超能陆战队》里 , 一个名为大白的机器人成功骗走了观众们的眼泪 。
靠着柔软的身体 , 身为机器人的大白也可以给主角带来温暖的拥抱 。

文章图片
回到现实里 , 绝大多数机器人都是一副金属的身躯 , 只能进行机械式的动作 。
但随着科技的发展 , 软体机器人正慢慢成熟 , 未来的机器人也能像电影作品里一样变得“温柔” 。
用“柔软的血肉”取代“钢筋铁骨” 想要把机器人变得“柔软” , 首先要从材料上入手 。
目前 , 绝大多数机器人都是基于金属制造的刚性结构 , 这一类机器人寿命长、比较稳定 , 制造门槛也越来越低 。

文章图片
但正如开头说得那样 , 自身的材料属性限制了刚性机器人的应用场景 。
例如在深海、洞穴、高山等恶劣环境下 , 刚性机器人很难灵活适应特殊情况 , 在压力下材质就会变形;而在医院、工厂等场景下 , 刚性机器人很难最大程度发挥自身特点 。
软体机器人的出现 , 本质是希望从材料上让机器人更加“柔和多变” , 像人一样进行工作 。
早期 , 软体机器人大多选择硅胶材质浇筑而成 , 在上世纪80年代末期 , 日本冈山大学软体机器人实验室成功研制一种硅胶机械手 , 该机械手利用气体压缩的原理进行机械驱动 , 可以进行简单的抓取操作 , 开创了柔性机器手的先河 。
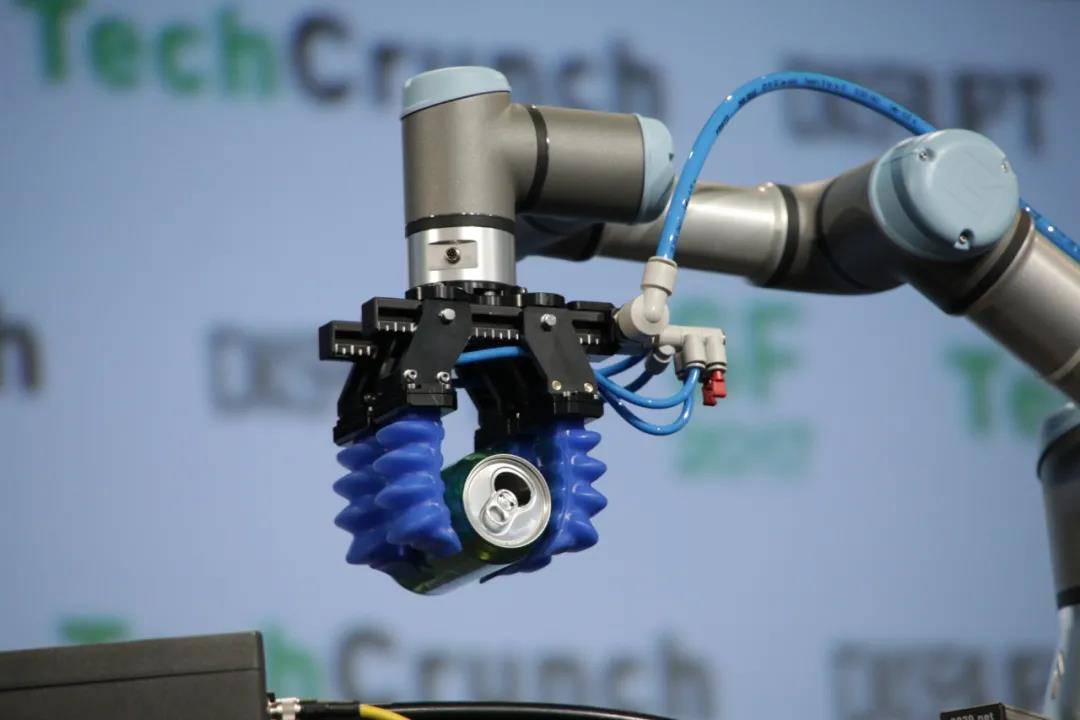
到了2011年 , 哈佛大学著名化学家George M. Whitesides(乔治·怀特塞兹)带领的研究小组从乌贼、海星以及其它无脊椎动物获得启发 , 研制了一种有四只“脚”的小型软体机器人 , 这种机器人可以像蠕虫一样在非常狭窄的空间里进行活动 。 这项发明结合了前几代软体机器人的特点 , 可以准确抓取各类产品 。

文章图片
这项发明 , 成功登上了当年的《科学》杂志 , 也基本奠定了软体机器人的发展路线 。
此后 , 软体机器人的材料主要是在硅胶材质的基础上进行改进 。 例如意大利Biorotics团队就在硅胶材质的技术上加入了沥青、纤维稳定剂、矿粉和少量的细集料组成了全新的SMA(Stone Matrix Asphalt)结构 , 增加了柔性触手的抓取力 。
另外一些研究团队将聚乳酸、聚酯等材质运用在机器人上 , 从而延长寿命 。
文章图片
总之 , 柔性机器人的进步离不开新材料的发展 , 当前柔性可穿戴技术 , 同样可以看作柔性机器人发展的一个缩影 。
如何让机器人动起来? 软体机器人另一个需要解决的难题 , 是如何将柔软的身体动起来 。
在依靠材料搭建完基体之后 , 机器人还要依靠驱动器(执行器)来运作 , 但目前软体机器人的体内依然是刚性驱动器 。 这就导致如今的软体机器人更像是“披着硅胶的刚性机器人” 。
如果想制作真正的“全软体机器人” , 那么需要着手改进机器人的驱动器 。
科学家们给出的解决方案很多 , 目前最主流的方法是依靠流体物理学的基本规则 , 给软体机器人创建执行器 。
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。