文章图片
王翔 中国载人航天工程空间站系统总指挥
文章图片
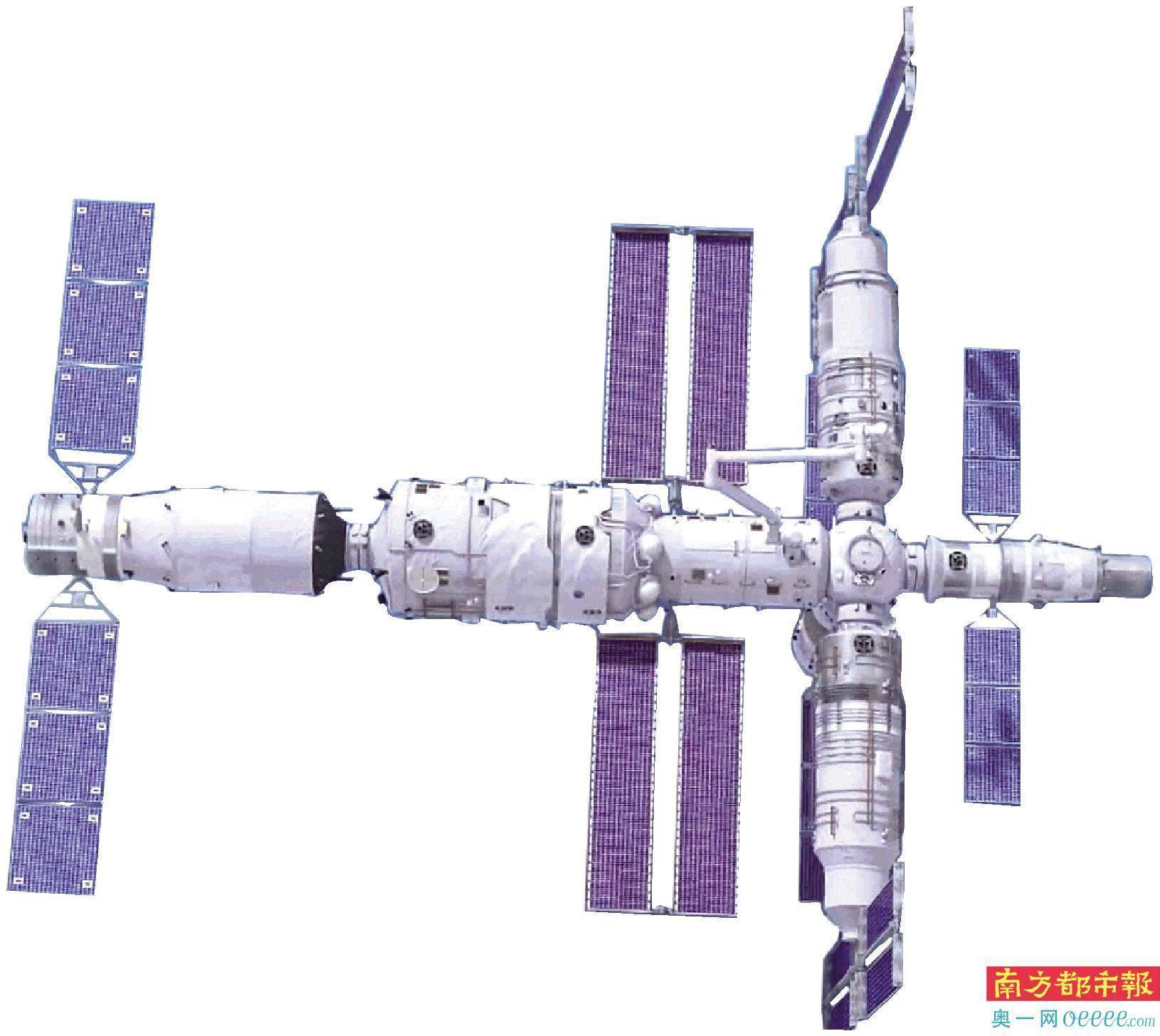
天宫空间站示意图 。
文章图片
特邀答主
王翔 中国载人航天工程空间站系统总指挥
课前预习
对接初始条件 什么情况下可以对接?
交会的终点就是对接的起点 。 此时 , 飞船相对于空间站的横向位置与速度、三轴姿态与角速度都尽可能接近零 , 只有轴向飞行方向保持预先设计的接近速度 。 工程以这些参数的状态作为对接开始的条件 。 此条件对于飞行控制系统而言是交会控制目标 , 对于对接系统则是要适应的初始范围 。 从系统全局来看 , 交会终点精度越高越好 , 而对接机构的容差范围则越大越好 , 这也是系统设计指标在进行分配时需要留余量的界面 。
【合体拢共分几步?一“瞄”二碰三连】这一刻 , 交会系统完成“交班” , 交会对接任务的接力棒交到了对接系统手中 。
交会飞行结束时 , 两个航天器已经实现了“1+1” 。 接下来的对接将使二者在舱体结构上实现“=1” , 成为运动控制、能源、信息、环境等舱内资源“=1”的基础 。
课内知识
从单航天器到组合体 对接需要几步?
作为两飞行器完成机械连接并形成刚性组合体的物理过程 , 对接主要包括三个步骤
01 接触、接纳和几何位置校正
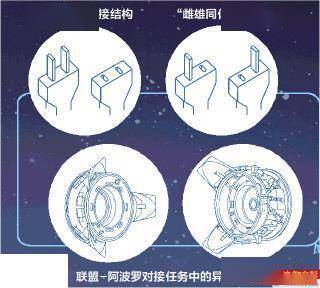
前文说到了交会飞行中为了消除误差而进行的轨道修正 。 交会飞行完成时 , 飞船和空间站的位置、相对速度、相对姿态、角速度都是一致的 , 也就是说 , 对正了 。 但偏差仍然存在 。 因此 , 两个飞行器的对接机构相互接触后 , 第一件事就是消除初始偏差 , 让双方的机械装置相互接纳 , 并且校正相互的位置关系 , 实现完完全全的“对正” 。 这个动作 , 类似拧螺钉时先对准螺孔的扶正动作 。
地球上造房子常常用到我国传统的榫卯结构 。 仔细观察可以发现 , 榫的头部略细 , 而卯的入口稍宽 , 空间对接的接触面构造类似更加精密的榫卯 , 通过特殊的几何导向特征 , 让两个航天器对接机构越接近、越对正 , 从而严丝合缝、你中有我我中有你地结合在一起 。 这种接纳和校正形式有杆锥组合、环锥组合以及外窄内宽的导向瓣组合 , 我们常见的螺钉头和螺孔边缘就是一对锥面组合 , 而导向瓣则如两只岔开手指的手相互插合 。
位置校正之后 , 为了使两个航天器的相对关系不再变化 , 捕获机构将在此时“抓住”对方 , 使彼此不再脱开 。
02 缓冲并消耗碰撞能量
高速飞行的大质量航天器 , 即使以较小速度相互接触 , 冲击能量也是相当可观的 。 飞船和空间站中至少一方需要配置缓冲和耗能装置 , 减缓冲击过载 , 耗散或吸收撞击能量 。
弹簧阻尼和液压伺服机构是自始至终随着对接技术发展而不断演化的缓冲形式 , 电磁阻尼装置的研究也在近年兴起 。 自适应电磁装置可以将捕获与缓冲耗能的工作合一 , 更突出的优点是由于其加入了主动控制环节 , 可以实现低冲击捕获 , 并通过电磁参数的调整控制适应更大范围的对接飞行器质量及对接初始条件 。
实际工程中 , 缓冲阻尼系统只在飞船的对接机构上安装 , 称为“主动对接机构” 。 空间站安装无缓冲系统的“被动对接机构” 。 这样做的好处在于 , 空间站一侧没有复杂机构 , 有利于长期飞行;飞船一侧虽然机构复杂 , 但由于工作寿命较短 , 设计和在轨维护的难度不大 。
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。