第二个节点是 2020 年 , 我们提出了宽频的概念 , 就是需要在有触感的低频频段全部做出振动量 , 而不需要额外的电压或者是信号去处理 。 整个软件层面上 , 包括芯片驱动层面上 , 对手机厂的牵绊是非常多的 , 受制于人 。 宽频马达从底层逻辑上将固频马达颠覆掉了 。 我们希望可以满足所有的虚拟内容 。 因为数字内容、虚拟内容才是所有用户最终直接感受到的 。 因此 , 我们希望从物理层面上解决掉所有软件层面上的限制 。
在物理层面上我们做了很多的设计变更来颠覆马达传统的物理结构 。 我们提出宽屏概念以后 , 欧美系的一些公司已经开始朝着这个方向去做了 。

文章图片
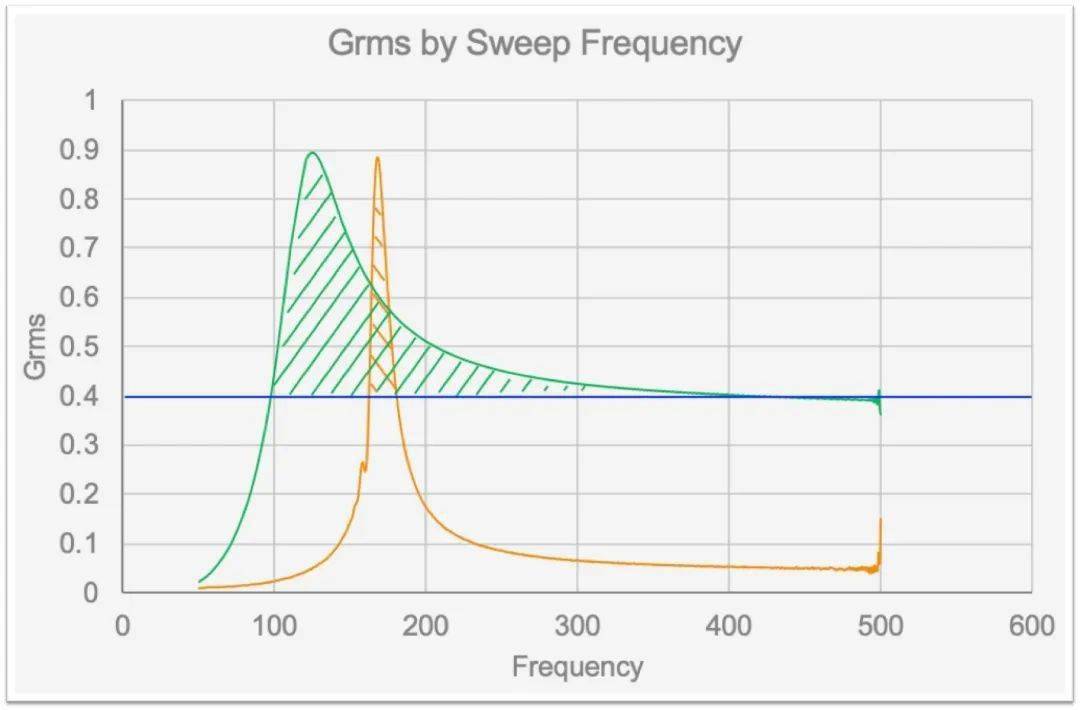
泛宽频震动系统
传统的线性马达能提供的振动量很小 , 大部分的触觉激励的效果并不是 f0(谐振点频率) 处其实在偏频的位置 。 数字内容 , 尤其是游戏内容 , 有非常丰富的频段 , 所以我们需要把偏频的激励拉上来 , 这就是我们说的传统马达的振量较小的原因 。
文章图片
文章图片
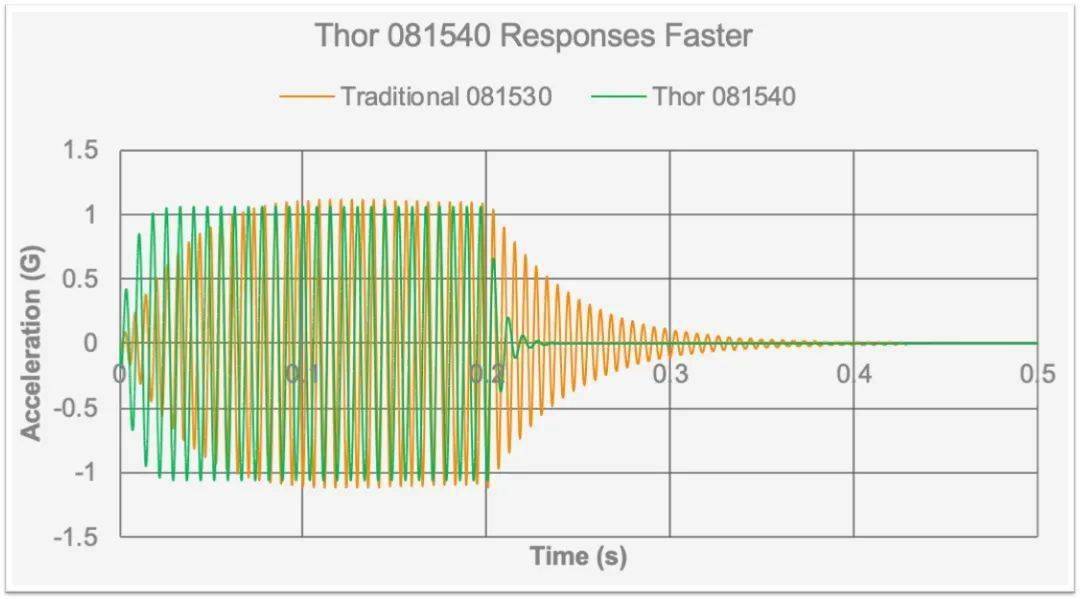
宽频马达性能曲线
第二 , 因为它是一个金属弹簧的结构 , 所以系统阻尼相对较小 , 响应时间比较长 , 这个响应时间是什么概念呢?正常的触觉交互的时候 , 是伴随着我们视觉跟听觉同时发生的 。
比如 , 大家在玩「吃鸡」的时候 , 扣了一个扳机 , 视效、声效已经完成了 , 最后的振感没来 , 就是拖尾或者有延时 , 用户体验非常不好 。
而且 , 金属弹簧给人的振动质感会很干涩、发飘、没那么饱和 。 这个没办法用语言非常详细地描述出来 , 需要实际体验 。
如何解决这个问题 , 首先其实要看人本身的敏感度 , 神经系统到底对什么频段比较敏感 , 到底是对切向力还是反向力比较敏感 , 到底是对快速的 , 对较 sharp 一点的还是比较 soft 一点的刺激敏感?这都是我们研究的历程 , 最后才反应在频响上面 。
03
触觉技术的核心
怎么衡量一个振动系统的性能 , 三个核心指标 , 第四个指标其实是我们重新定义出来的 。
第一个指标就是振动量 , 国内对振动量的理解上是有偏差的 , 为什么讲偏差呢?
真正回归原始的设计的时候 , 我们是不测振动量的 , 振动量可以理解成加速度 , 为什么测它是有偏差的?因为在神经学上 , 人对所有对外界机械信号的刺激的反应 , 并不是力 , 这件事情其实我们国内是有误解的 。 真正敏感的其实是皮下神经细胞的形变 。 形变 , 反应在一个关键的参数上不是加速度 , 是动量 , 是 MV(动量) , 那个才是真正衡量一个马达对力感的最直接的指标 。

文章图片
第二个指标就是 F0 , 这里面有一个悖论 , 就是 F0 越高 , 能量越高 , 测的加速度越高 。 但实际上越高频 , 上手的力感越差 。 后来我们发现 F0 压的越低 , 手感饱和度越高 。 所以既要压低 F0 , 但又不能损失大家特别在意的即时的振动量 , 怎么办?这就是一个设计的平衡 。 因为既要把新的技术落地 , 又要满足客人的技术指标 , 所以我们在性能上花心思去做平衡 , 最后让客户看到我们的产品 , 不管是 F0 还是 G 值 , 都不输传统的马达 。
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。