文章图片
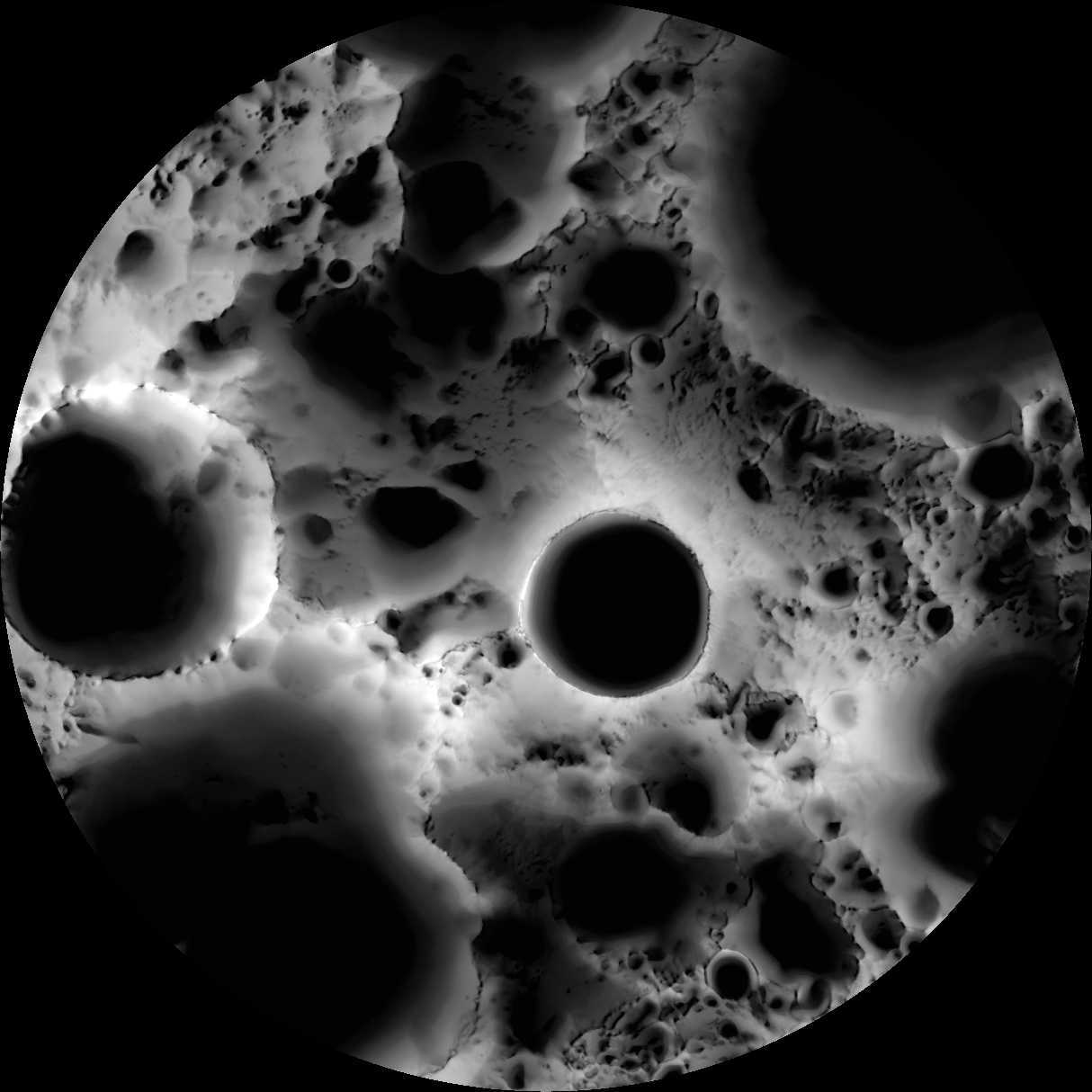
月球南极的永久阴影区与连续光照区
回顾嫦娥探月工程以往着陆任务 , 嫦娥三号、嫦娥四号、嫦娥五号连续三次成功软着陆月面 , 登月成功率100% , 具备了根据探测需求任意选择着陆区的“全月面到达能力” , 上述着陆器均使用自主创新的基于机器视觉理念的相对位姿导航方案 , 解决了自主登月的安全性问题 , 但是着陆精度并不能满足定点着陆要求 。
实现定点着陆无外乎两种方案 , 一种是事先在月面放置无线电信标 , 着陆器在着陆过程中与信标通信 , 实时获取相对信标的三维坐标;另一种就是基于图像匹配的相对导航 , 着陆器计算机预先储存航迹下方月面图像信息 , 着陆过程中光学相机成像 , 并与预先储存图像进行匹配预报落点偏差 , 进而控制发动机推力实现偏差修正 。
文章图片
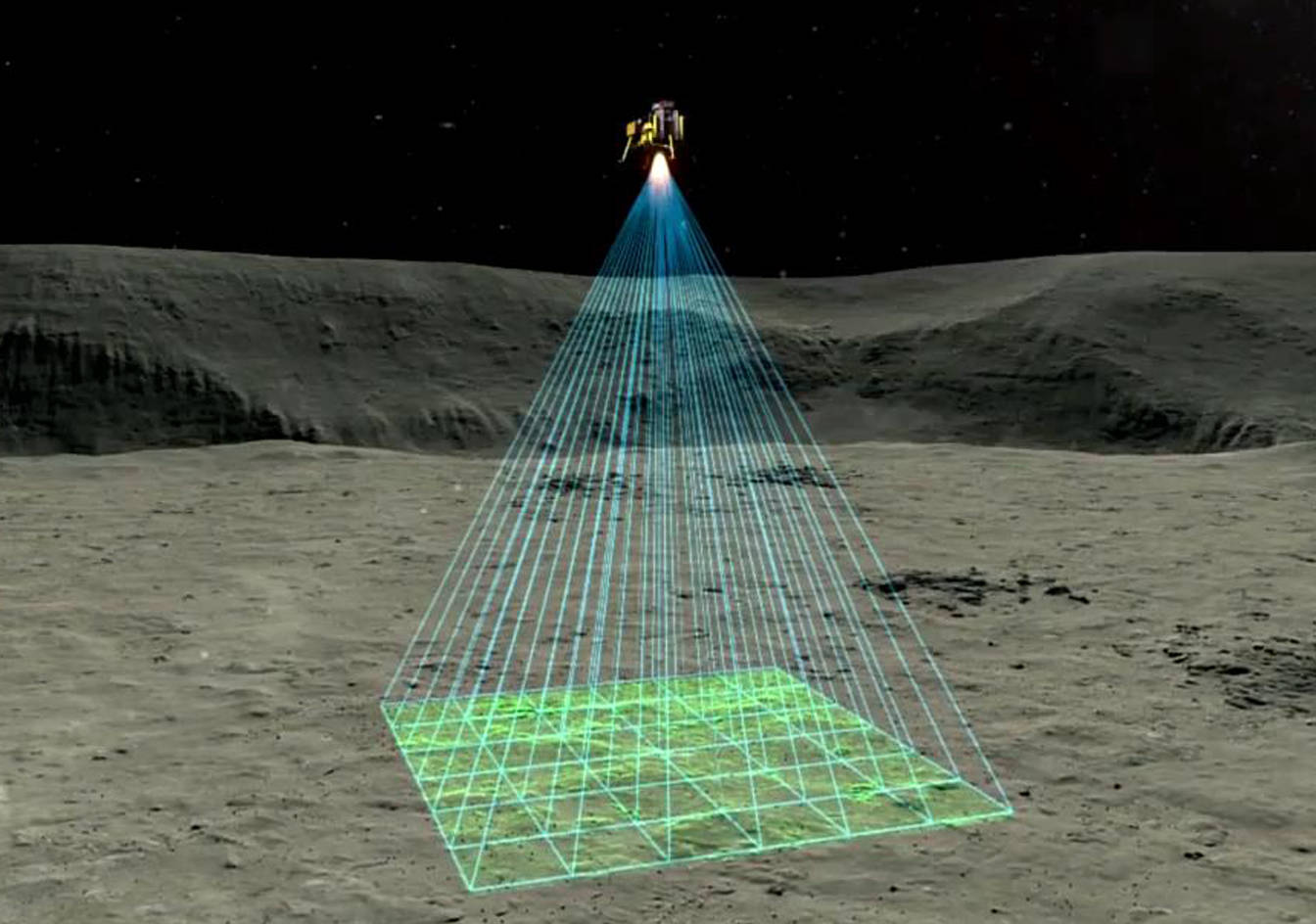
嫦娥四号着陆器激光三维成像敏感器作业效果图
对于嫦娥七号着陆器而言更适合采用“图像匹配的相对导航方案”实现定点着陆 , 同时结合基于机器视觉理念的相对位姿导航方案 , 满足既精准又安全的着陆需求 。 后续可引入无线电信标导航方案进行定点着陆 , 进而满足月面科研站建站需求 。
嫦娥二号获取的7米分辨率全月图 , 以及嫦娥七号轨道器获取的预选着陆区高分影像 , 都可以助力实现“图像匹配相对导航+相对位姿导航” 。
文章图片
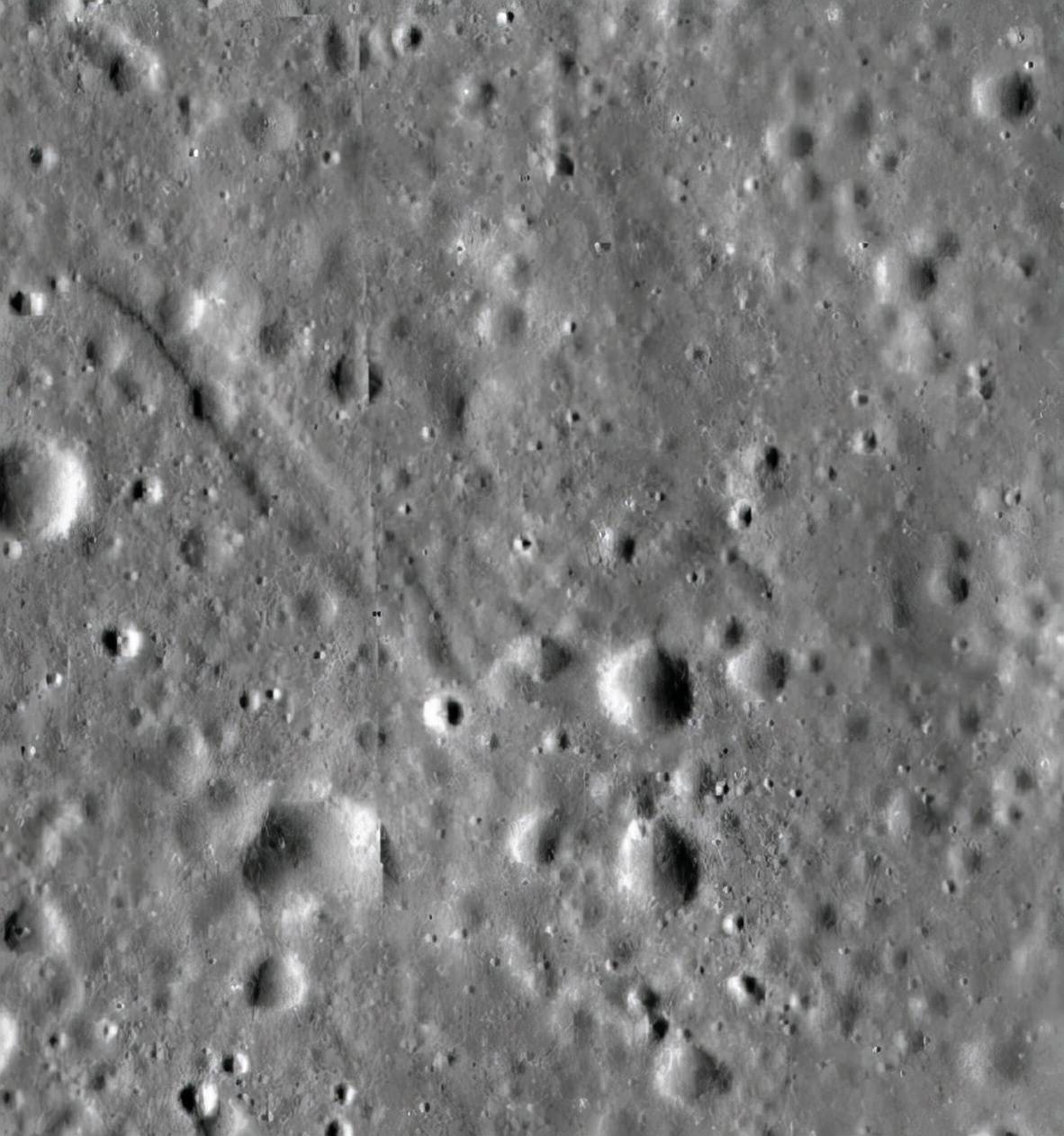
图像匹配相对导航需要高分辨率月面影像支持
着陆器组合体登陆月球南极过程中离不开中继星的支持 , 嫦娥四号任务中在地月拉格朗日L2点Hola轨道部署的鹊桥中继卫星对月球南极预选着陆区可视性并不好 , 且通信距离远影响通信速率 , 有效测控时间极为短暂 , 所以嫦娥七号着陆器组合体难以依托鹊桥中继星进行测控 。
文章图片
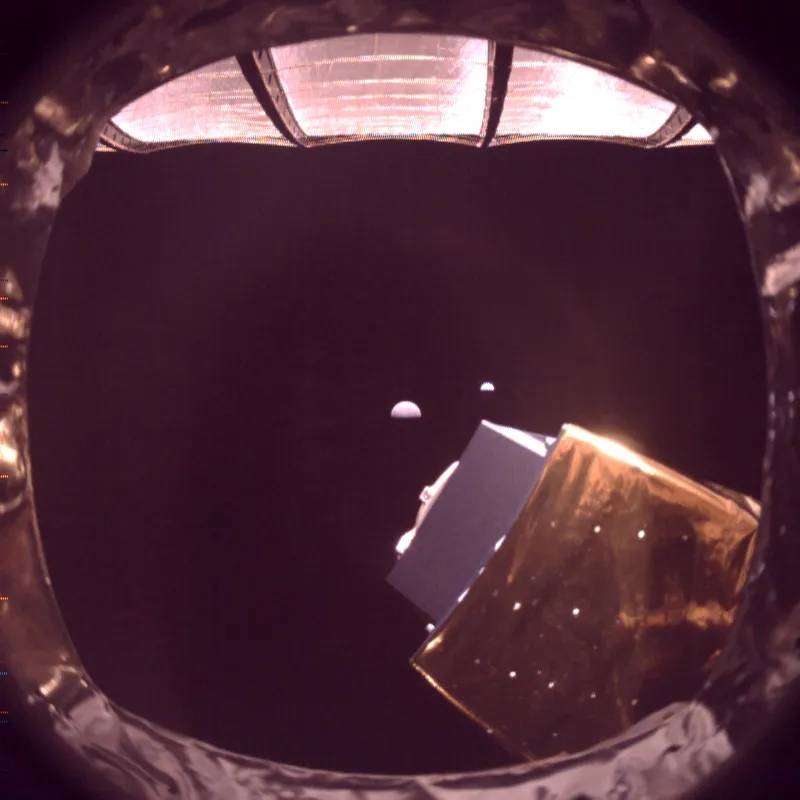
鹊桥中继卫星难以保障月球极区探测测控
因此 , 才有了前文提及的服务月球南极探测的新中继星 , 该中继星与嫦娥七号分离后 , 自主变轨至周期12小时的中继轨道 , 这是一条环月大椭圆倾斜冻结轨道 , 抵消了摄动影响 , 使得中继星不需要消耗推进剂也可以保持轨道 , 从而确保了为期8年的设计寿命(实际寿命更长) 。
文章图片
嫦娥七号探测器携带的新中继卫星
嫦娥七号中继星最多可同时服务10个月面用户航天器 , 可有效支撑后续月面科研站建设与运营任务 。
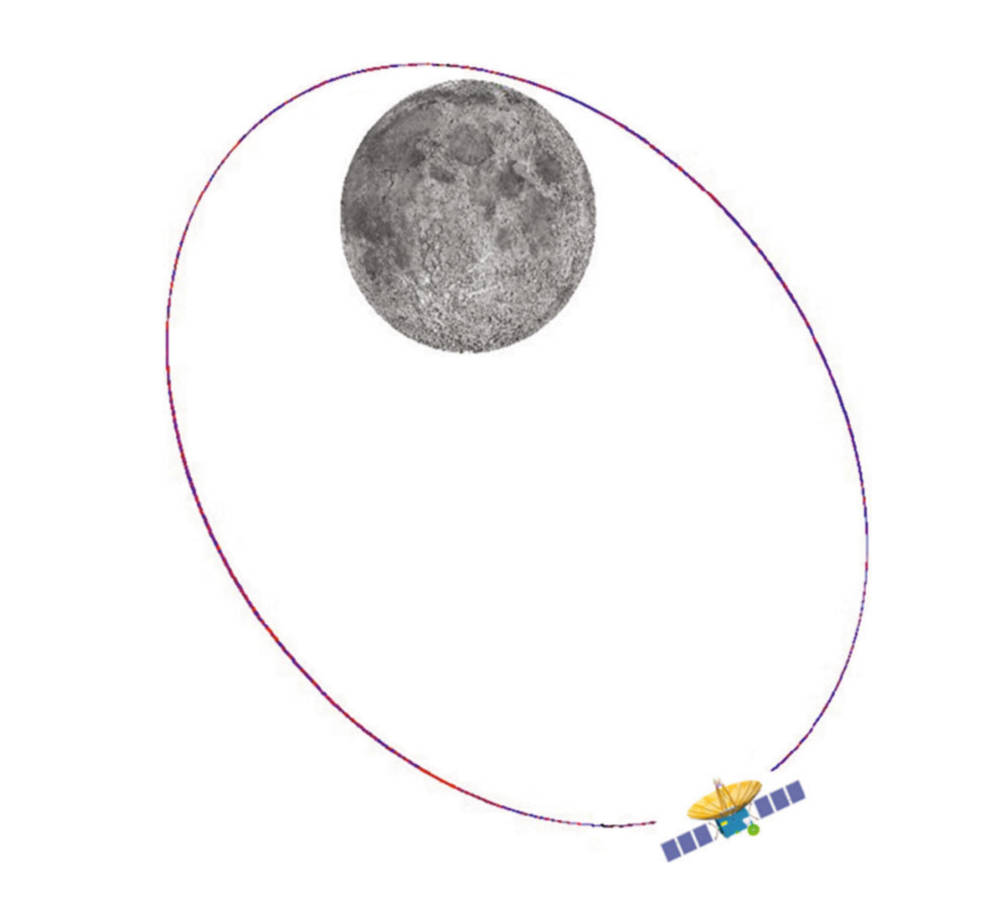
文章图片
环月大椭圆倾斜冻结中继通信轨道
中继轨道远月点在月球南极上空 , 三分之二轨道周期均对着陆器组合体可见 , 每圈可用测控时间约8小时 , 如果需要全天连续覆盖测控 , 只需再发射一颗中继星即可实现 。 (除中继测控任务外 , 中继星还将搭载“VLBI试验系统”与“阵列中性原子成像仪”进行相关科学研究工作)
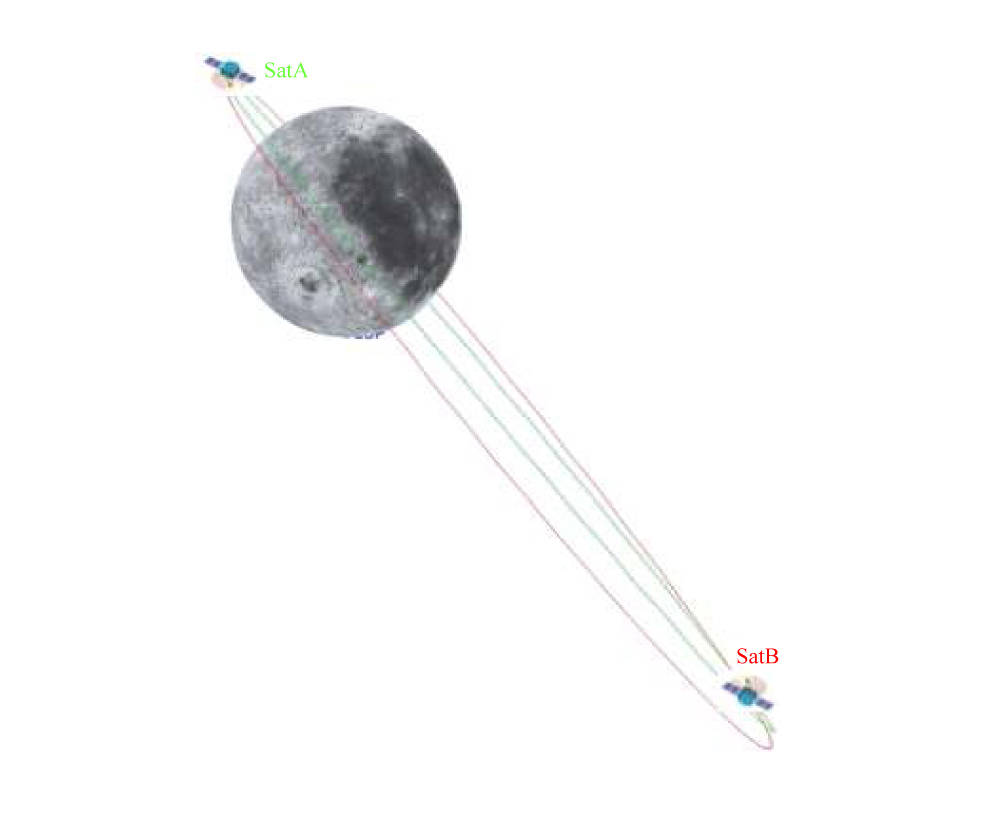
文章图片
两颗中继卫星即可实现月球南极地区全天时连续覆盖(双星环月冻结轨道)
嫦娥七号着陆器组合体需要选择在中继星测控弧段内实施登月 , 这一技术早在嫦娥四号任务中就已经实现 , 地面深空测控网可近实时接收着陆器组合体通过中继星回传的相关测控数据 。
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。