是机器人开始教会她怎样使用双腿 。 让她体验「独立行走」的艾动机器人大约重 20 公斤 。 和我穿戴的外骨骼还有一些不同 , 只有腰腿部的钛合金骨骼架 , 没有外围的站立辅助支架 。
安琪一开始尝试带着框架辅助的外骨骼进行训练 , 大艾机器人 CEO 帅梅看到安琪的状态挺好 , 提议她试一试穿另外一款 , 拄拐杖走 。
最早研发外骨骼机器人的时候 , 帅梅并没有设想能帮助到像安琪这样的「脑瘫」患者 。 安琪也没有想象过自己的余生能够摆脱轮椅 。 现在 , 她能够用肘拐走路 , 最大的愿望是继续摆脱拐杖 , 多出一只手 , 就可以更好地照顾自己 。
文章图片
外骨骼机器人艾康(左)、艾动(右)|来源:大艾机器人
02
机器向人学 , 再教会人
对帅梅而言 , 研发外骨骼机器人 , 可以追溯到她 03 年在清华精密仪器系做博士后 。 刚开始 , 她的研究方向是「仿人机器人」(humanoid robot) 。
那时她研究如何让机器人模仿人行走 。 她向我回忆 , 当年她所在的团队做成的「中国第一个崎岖路面上行走的仿人机器人」 , 在地上随意撒一把从 5 毫米到 2 里面高低不等障碍片 , 小机器人能够跨越障碍走过去不摔倒 。 「这也为所有的技术打下了基础 。 」
对人而言 , 脚下突然遇到凸起 , 会条件反射做出反应 , 甚至能够瞬间调整重心避免摔倒 , 这源于自我保护的本能 。 让机器人习得这样的「本能」却不容易 , 帅梅团队的策略是通过算法计算脚底受力 , 再依此来调节腿和躯干的步态 。
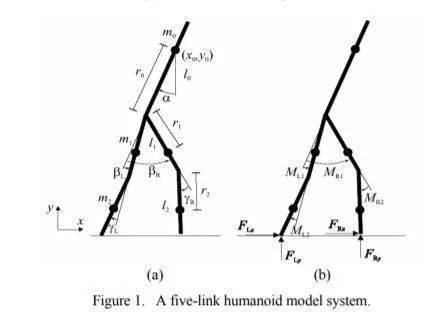
文章图片
帅梅 2006 年发表论文中的五轴仿人机器人系统示意图 | 来源:IEEE
那时 , 仿人机器人是一个前沿的学术领域 , 而帅梅希望做出能够实际应用的技术 。 用作医疗器械的「外骨骼机器人」成为了合适的选择 。 最初设计时 , 她的目标是做帮助老年人和偏瘫患者恢复行走功能的机器人 。
或许是研究过步态 , 让她对人的走路姿势多一分敏锐 。 交谈时 , 帅梅不时从椅子上起身 , 模仿各种走路姿势 。 她脚底贴着地面 , 左右脚挨在一起 , 相互向前撮挪——一次在地下通道 , 她看见一个老大爷用这样的姿势走路 , 「我就在想 , 人到老了如果都是这样的一个状态 , 生活就会很悲哀 。 」在北航校园 , 她经常看到走路不便的退休教师 , 母亲年纪变大 , 腿脚也逐渐不便 。
以仿人机器人的技术积累为基础 , 研究外骨骼下肢的步态研究、控制方式、机构设计 , 在技术路径上也顺理成章 。 于是在 2009 年左右 , 她将研究的目标转向了下肢外骨骼机器人 。 2016 年 , 大艾公司成立 , 开始产业运作 。 在临床实验中 , 她发现下肢机器人对脑瘫、截瘫患者都有明显的疗效 。
一年后的 2017 年 , 邵海鹏在北京第一次穿上了大艾机器人 。 「坐着看世界和站着看世界 , 那是两个世界」 。
半年多前 , 做电焊工作的他从 17 米高的地方坠落 , 安全带折断 , 腰部到胸部的第 11、12 截脊椎断裂性骨折 。 从此 , 他成为一名截瘫患者 , 肚脐两三寸之下再没有知觉 , 之后就没有这样「自然地」站起来过了 , 被机器人带着向前走的时候 , 双腿依旧没有任何知觉 。 但他觉得「跟自已走一样 , 就闭着眼睛往前走」 。
没有知觉 , 大脑也无法指挥腿部 。 做理疗时 , 康复师一边将他的腿抬起 , 一边让他用「意念」想象自己的腿能够抬起——邵海鹏对截瘫前的走路状态还有记忆 , 而对从没有用双腿走过路的安琪来说 , 寻找站立的姿势则需要两个人辅助完成 , 一个人扶着腰 , 一个人扶着腿 。
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。