机器人技术
除了标准不够完善外 , 机器人技术是当前变电站机器人应用的重要阻碍 。
(1)机器人本体
机器人属于精密仪器 , 长期运行于室外环境对其内部元件的寿命影响较大 , 尤其是可见光镜头、红外镜头、通信装置和电池等方面 。
(2)点位识别
无论是有轨机器人还是无轨机器人 , 其在巡视过程中对点位的识别还需进一步提高 。 经过一段时间的运行后 , 机器人经常出现点位偏差的情况 , 无法正确定位需要拍摄的设备或仪表 。 因此 , 需要对机器人巡视点位进行定期维护 , 以确保机器人的正常运行 , 无形中加重了厂家及运维人员的工作量 。
【点评变电站智能巡检机器人】同时 , 无轨机器人巡视时的导航也靠智能识别技术 , 识别精度的选择也是目前的一个难点 , 过高过低都会影响机器人的正常运行 。
文章图片
点位识别错误

文章图片
设备定位误差较大
(3)可见光识别
前面介绍过 , 机器人可见光巡检中包括表计读数 , 而实际运行中会发现 , 机器人表计读数的正确性很难保证 , 会大面积误报警 。 一方面与现场设备状态有关 , 例如表计玻璃脏污、互感器油位较难观测等;另一方面是机器人识别技术的不完善 , 无法对所拍摄照片中表计的读数进行准确识别 。 这就导致机器人的可见光巡检形同虚设 , 并没有减轻运维人员的工作量 。
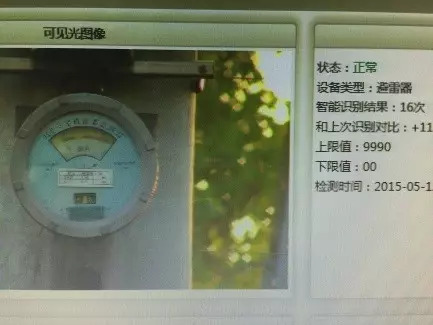
文章图片
避雷器动作次数识别错误

文章图片
断路器SF6压力误报警
(4)测温准确性
红外测温受多方面影响 , 镜头精度、对焦、距离和角度等都会影响所测设备温度 。
虽然《变电站智能机器人巡检系统运维规范》中规定:对于主变等大型设备要求360°全覆盖 , 如主变本体 , 要求从正面、背面、左面和右面进行巡检 , 以确认主变无渗漏油、破损、锈蚀 , 测温正常;对于隔离开关等柱型设备 , 要求进行不少于2个方向的外观拍摄和红外测温 , 以确认无歪斜、破损、裂纹、渗漏油 , 测温正常 。 但机器人在距离和角度上无法做到连续调节 , 其测温往往低于设备实际温度 , 不利于运维人员对于设备发热程度的判断 。 目前的做法一般是机器人检测到设备发热后 , 由运维人员到现场进行实测核实 , 进而对发热情况进行定性 。
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。