地形相对导航十分依赖环月轨道卫星拍摄的高分辨率图像 , LRO月球勘测轨道飞行器是当前部署月球成像分辨率最高的环月轨道卫星 , 它可以提供0.5米分辨率的全色图像 , 如果适当降低成像高度 , 分辨率还可以进一步提升至0.27米 。

文章图片
环月卫星成像并不能完全识别月面障碍
然而即便有如此之高的成像分辨率也仍然不能保证登月行动的万无一失 , 因为图像数据存在误差 , 月面的复杂地形将进一步放大误差带来的着陆安全隐患 。
怎么办呢?
嫦娥探月工程已经做出了表率 , 该工程框架下的嫦娥三号、嫦娥四号、嫦娥五号三次登月任务接连成功 , 成功率100% , 其中尤以嫦娥四号的月球背面着陆任务最具代表性 。

文章图片
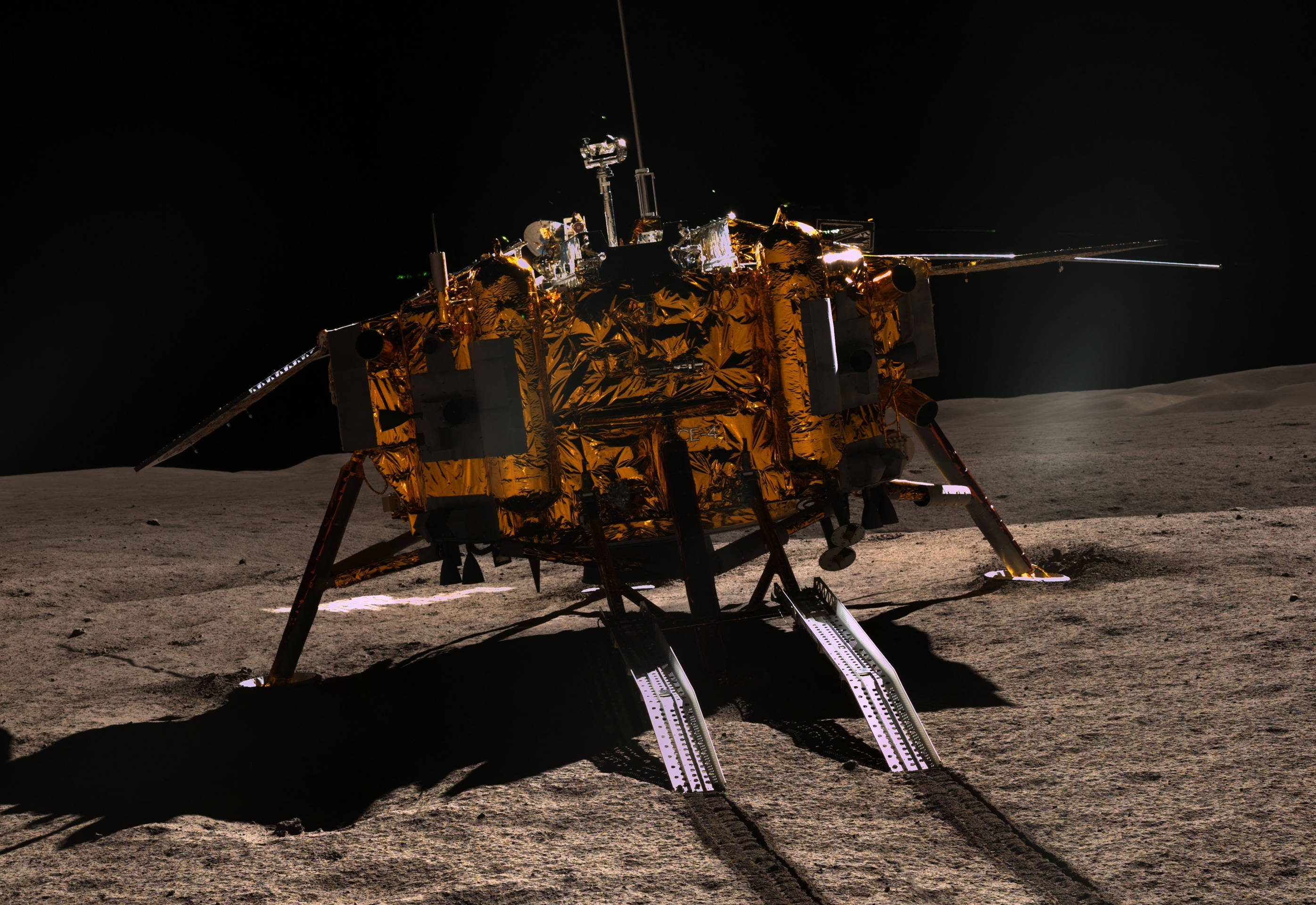
嫦娥四号
嫦娥四号着陆位置位于月球背面“南极-艾特肯盆地”的“冯卡门撞击坑” , 这里是月球撞击坑分布最密集的区域 , 完成此项登陆任务将意味着获得全月面到达能力 。
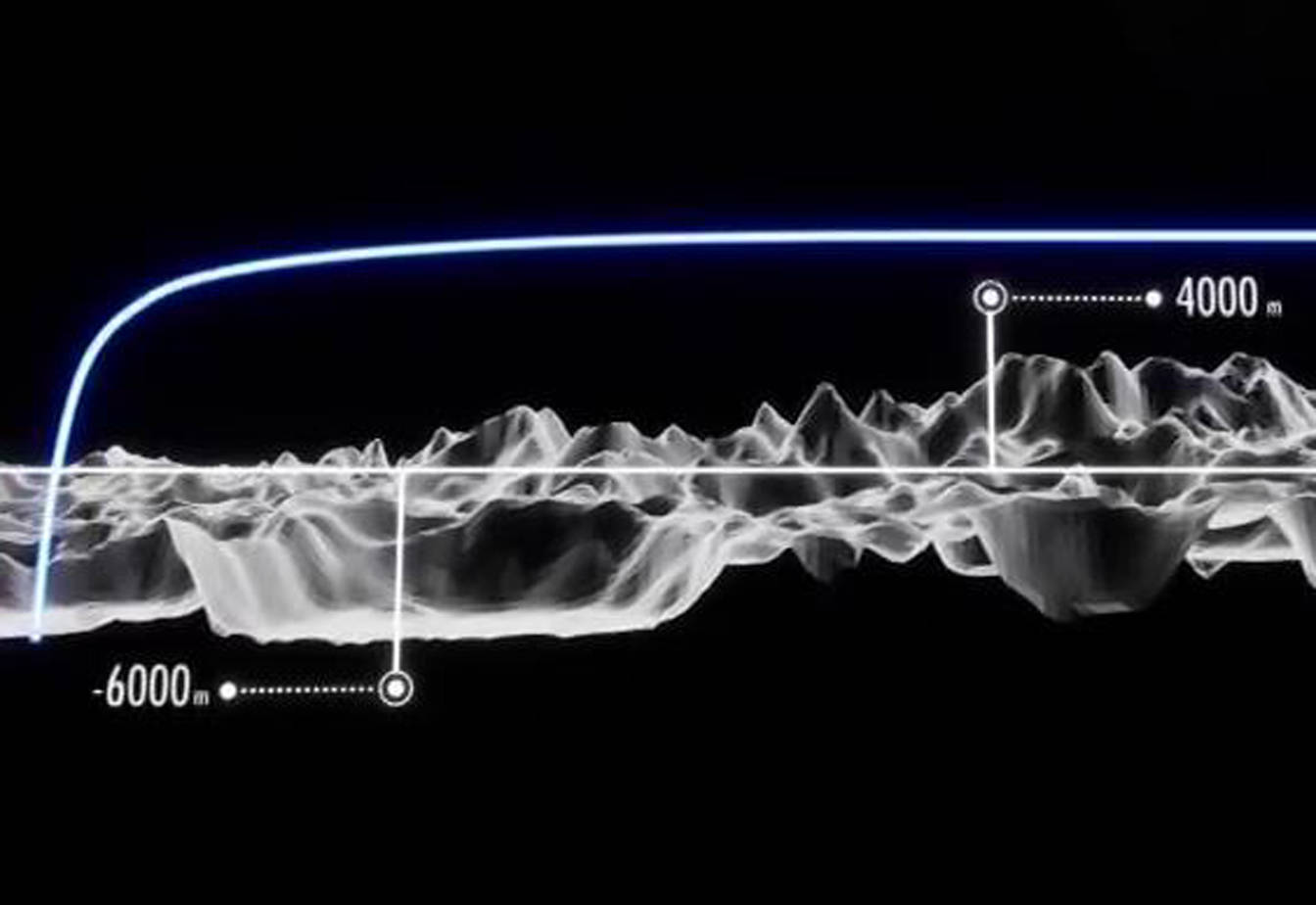
摆在嫦娥四号着陆器面前的不再是类似嫦娥三号着陆区那样的平坦地形 , 而是平均高度达4000米的高大山系 , 如果算上冯卡门撞击坑的深度 , 垂直落差近万米 , 超越了珠穆朗玛峰的8848.86米 。
文章图片
嫦娥四号着陆区近万米地形落差
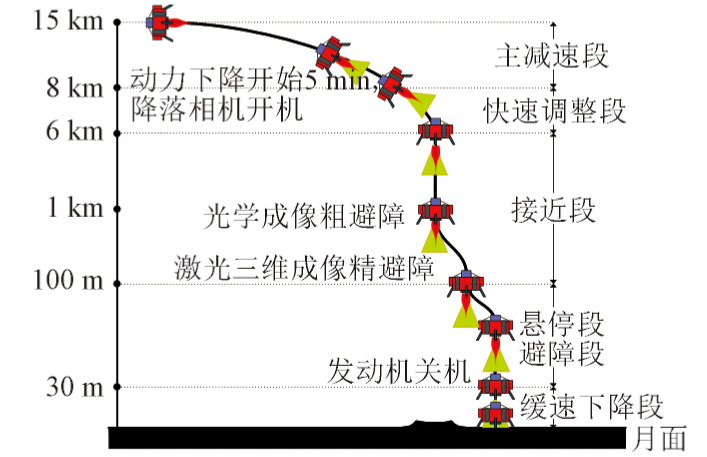
因此嫦娥四号不能像嫦娥三号那样平缓落月 , 而是要采取定点跳伞的方式在6000米高空基本消除水平速度开始垂直降落 。

文章图片
嫦娥四号转垂直下降姿态
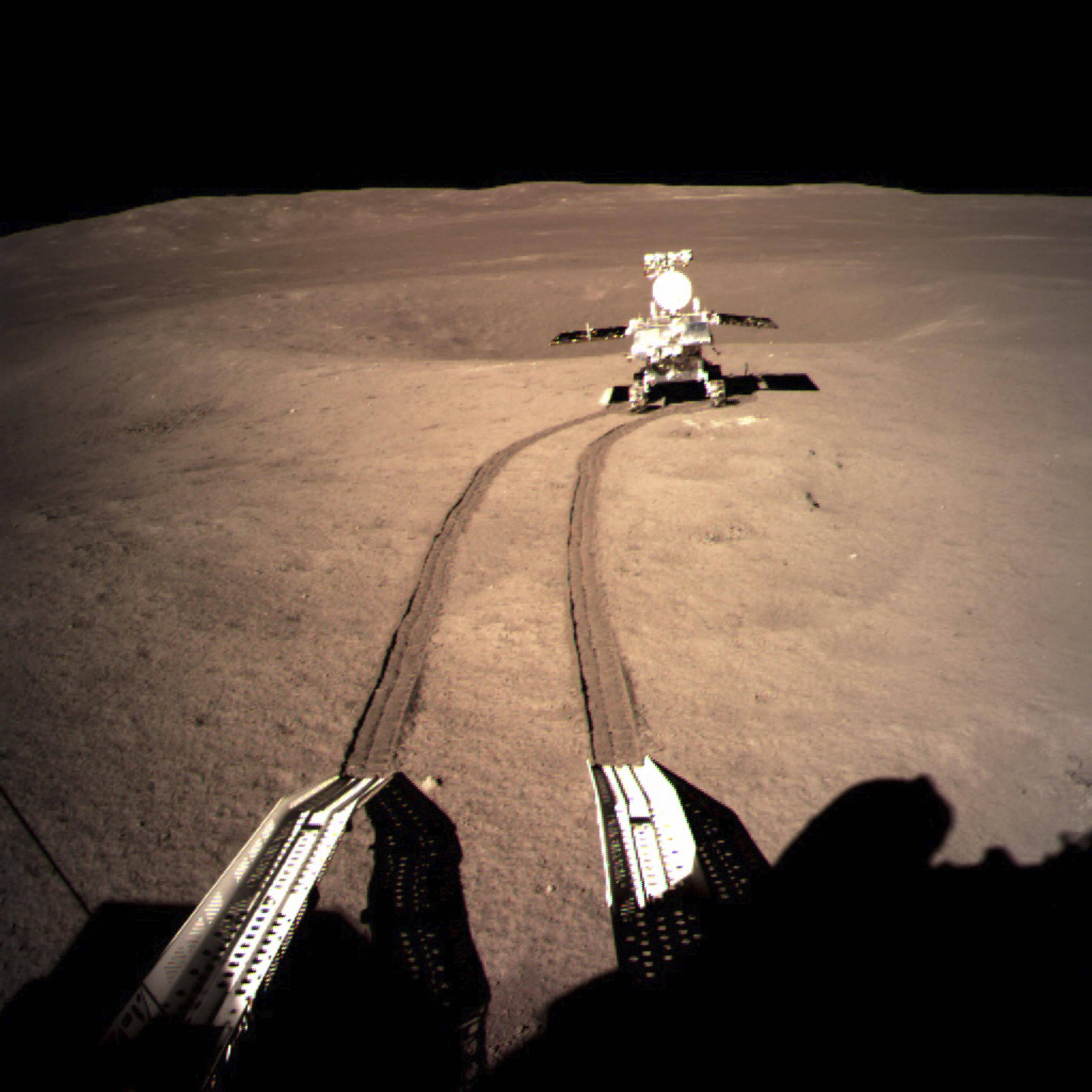
最终降落月面后通过着陆器监视相机成像画面可以看到 , 距离着陆点仅十几米的距离就有一个直径29米的撞击坑 , 这个撞击坑正对月球车驶离坡道 , 其他方向也有多个撞击坑 , 以致于进行两器互拍任务时玉兔二号月球车不能抵达设计的拍摄地点 , 而在其互拍图像中又看到着陆器降落在了一个撞击坑边缘的斜坡上 , 由此可见月球背面地形的复杂程度 。
文章图片
玉兔二号的身后就是一个宽约29米的撞击坑
文章图片
嫦娥四号着陆器降落在一个斜坡上
嫦娥四号之所以能够拿下月球背面复杂地形登陆任务 , 主要得益于基于机器视觉理念的一系列首创自动登月技术 。 微波测距/测速敏感器、激光测距敏感器、降落相机、激光三维成像敏感器在内的一系列敏感器是着陆器的眼睛 , 7500N变推力发动机与一系列姿控动力则是执行机构 , 眼睛获取的信息通过计算机生成指令控制发动机进行降落与避障 , 同时又创新了粗避障与精避障相结合的接力避障方案 。
文章图片
嫦娥四号动力下降轨迹示意图
首先是在约一千米高度进行粗避障 , 避开目标较大的障碍物 , 尔后抵达100米高度后在7500N变推力发动机与姿控动力作用下实现悬停 , 此时一个关键的装置“激光三维成像敏感器”开始发挥作用 , 它将发射激光波束获取着陆区斜距数据绘制三维立体图像 , 并基于“安全半径螺旋搜索法”选取“安全着陆点” , 看似繁琐的过程实际上只需要1至2秒 , 然后着陆器开始向安全着陆点机动并缓速下降 , 最终实现月面软着陆 。
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。