文章图片
嫦娥四号配置的“激光三维成像敏感器”
文章图片
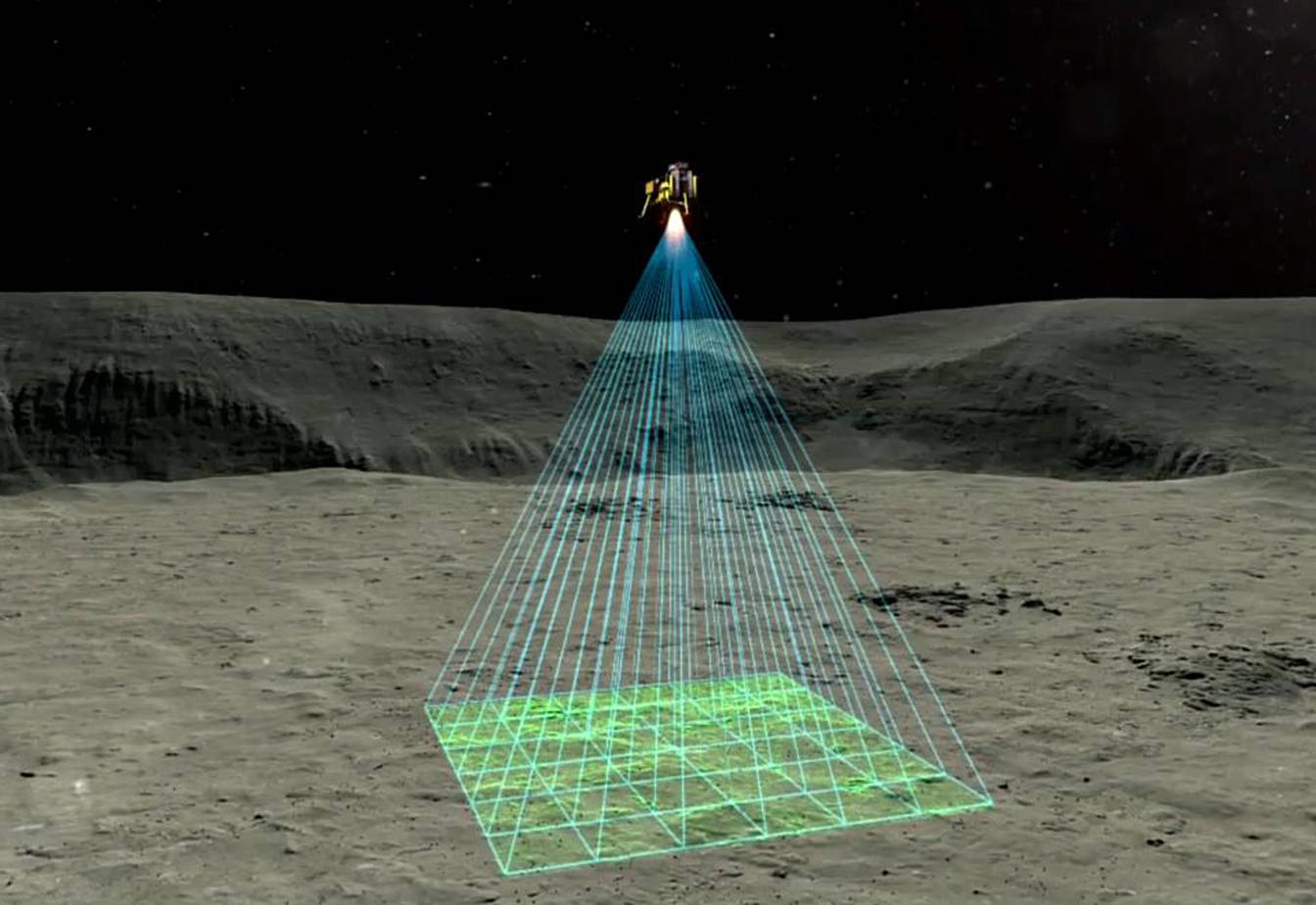
激光三维成像敏感器获取着陆区斜距 , 并与激光测距敏感器协同工作 。
文章图片
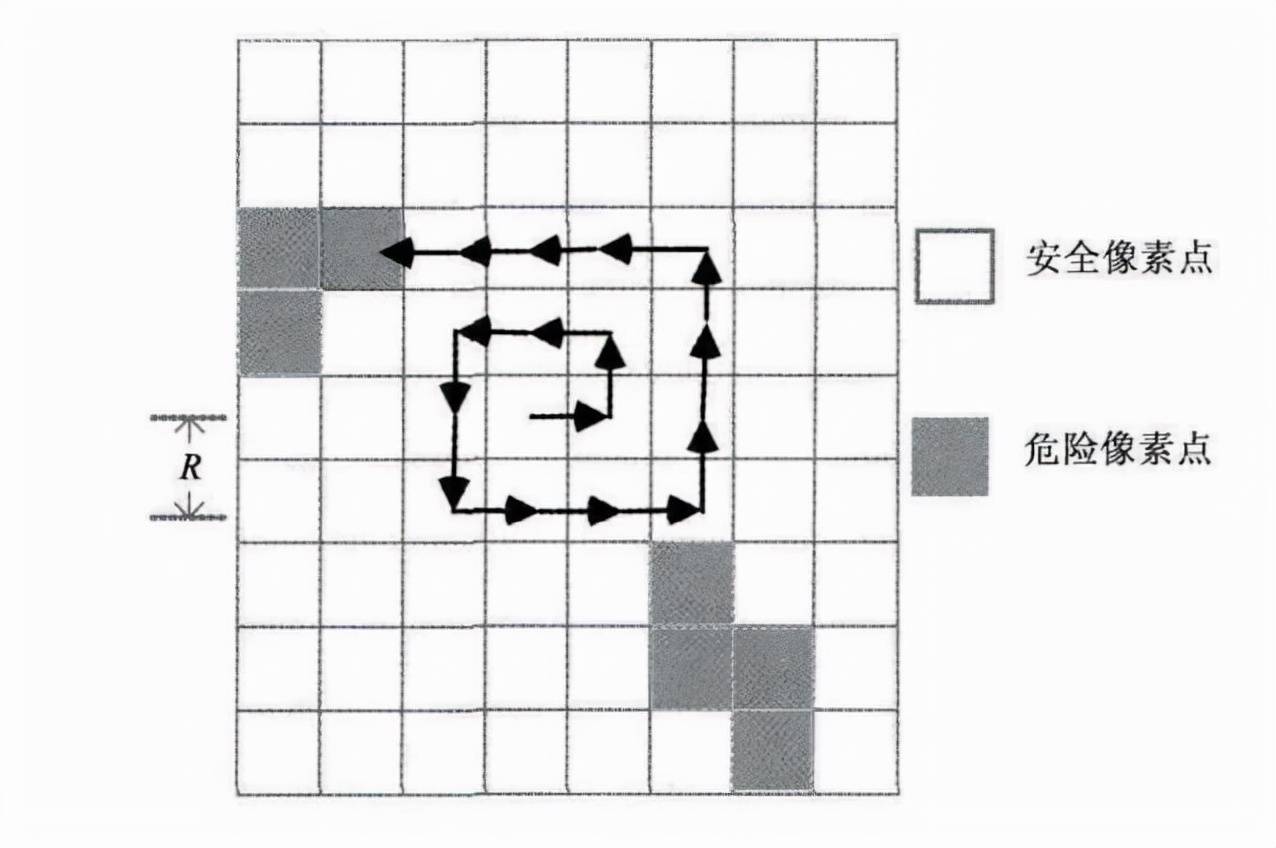
安全半径螺旋搜索法

文章图片
图像中心是设计的标称着陆点 , 有密集分布的撞击坑 。 图像左侧十字则是着陆器自主选择的安全着陆点 。
NASA也曾计划在火星登陆任务中使用可获取三维图像的激光雷达(与激光三维成像敏感器属同一类型设备) , 但不论是好奇号亦或者毅力号都没能在降落任务中实现工程应用 。
鉴于激光雷达在嫦娥探月任务中的出色表现 , 宇宙机器人技术公司的鹰狮号着陆器也希望加装激光雷达 , 但最终能否装配此设备仍然是未知数 。
由于月球极区复杂地形的登陆难度高 , NASA与宇宙机器人公司并不打算一开始就挑战月球南极登陆任务 , 除承运毒蛇号月球车外 , 在商业月球有效载荷服务计划框架下宇宙机器人技术公司的游隼号着陆器将先期于明年第一季度搭乘火神运载火箭进入地月转移轨道 , 并着陆于月球正面比格撞击坑西南区域 , 这是一片较为开阔平坦的高原 。

文章图片
游隼号小型着陆器
明年上半年游隼号若如期登月 , 这将是时隔近半世纪后大洋彼岸再次具备月面软着陆能力的一个标志性事件 , 此任务也可看作是针对毒蛇号月球车着陆任务的一次预演 。
话说毒蛇号月球车届时历经艰辛来到月球南极后将如何展开寻找水源的工作呢?
毒蛇号月球车长宽都是1.5米 , 桅杆顶部高度是2.5米 , 发射质量达到了450公斤 , 整体规模是玉兔二号月球车的三倍有余 , 采用主动悬架四轮驱动设计 。

文章图片
毒蛇号行走机构爬坡测试
在此之前人类地外天体星球车诸如旅居者号、勇气号、机遇号、好奇号、玉兔号、玉兔二号、毅力号都是被动悬架 , 只有我们的祝融号采用的是主动悬架 。

文章图片
祝融号是当今人类部署地外天体的唯一一辆配置主动悬架的星球车
主动悬架的优势是可以抬升车体通过复杂地形 , 同时还可以抬升车轮进行尺蠖运动 , 有利于在遭遇危险时及时脱困 , 这对于在复杂月面有快速行驶需求的毒蛇号而言是十分必要的 。
文章图片
毒蛇号行走机构外场测试悬架抬升 , 它将具备类似祝融号的机动能力 。
毒蛇号行驶速度可以达到0.72公里/小时 , 也比玉兔二号更快 。 之所以追求更快的行驶速度是因为前者的寿命限制 , 毒蛇号没有配备类似玉兔二号的同位素温差热源 , 使得它难以抵御月夜环境下的极低温 。
按照设计毒蛇号月球车只能在无光照环境中停留不超过50小时 , 这一设计也是为了进入永久阴影区 , 并不是为了月夜生存 。
月球南极区域虽然有长期连续光照优势 , 但这不代表没有月夜 , 一旦度过长期连续光照的月昼 , 月球南极地区的月夜时间将比其他区域时间更长 , 因此其设计寿命被限定在100天 。 毒蛇号月球车必须在有限的时间内进行探测 , 不必期待它可以像玉兔二号那样可以超期服役 , 因为一旦进入长周期的月夜就意味着任务的终结 。
特别声明:本站内容均来自网友提供或互联网,仅供参考,请勿用于商业和其他非法用途。如果侵犯了您的权益请与我们联系,我们将在24小时内删除。